I’ve got Leddarone working perfect when using the sensor looking down. The problem comes when you want to avoid the ceiling indoors and set the sensor upwards with RNGFND_ORIENT set to 24. Then the sensor just frozen up and says BAD LIDAR HEALTH. Any help please?
But it doesn’t work and I don’t understand it. As you can see it is supposed to be very easy. There is something missing there, because I’ve done exactly as there. Any clue?
The parameters I set:
RNGFND_ADDR: 49
RNGFND_TYPE: 14 (TrOneI2C)
RNGFND_MAX: 6000
RNGND_MIN: 50
PRX_TYPE: RangeFinder (4)
AVOID_ENABLE: StopAtFence, UseProximitySensor (Qgc says the flag for those is 3 instead of 7)
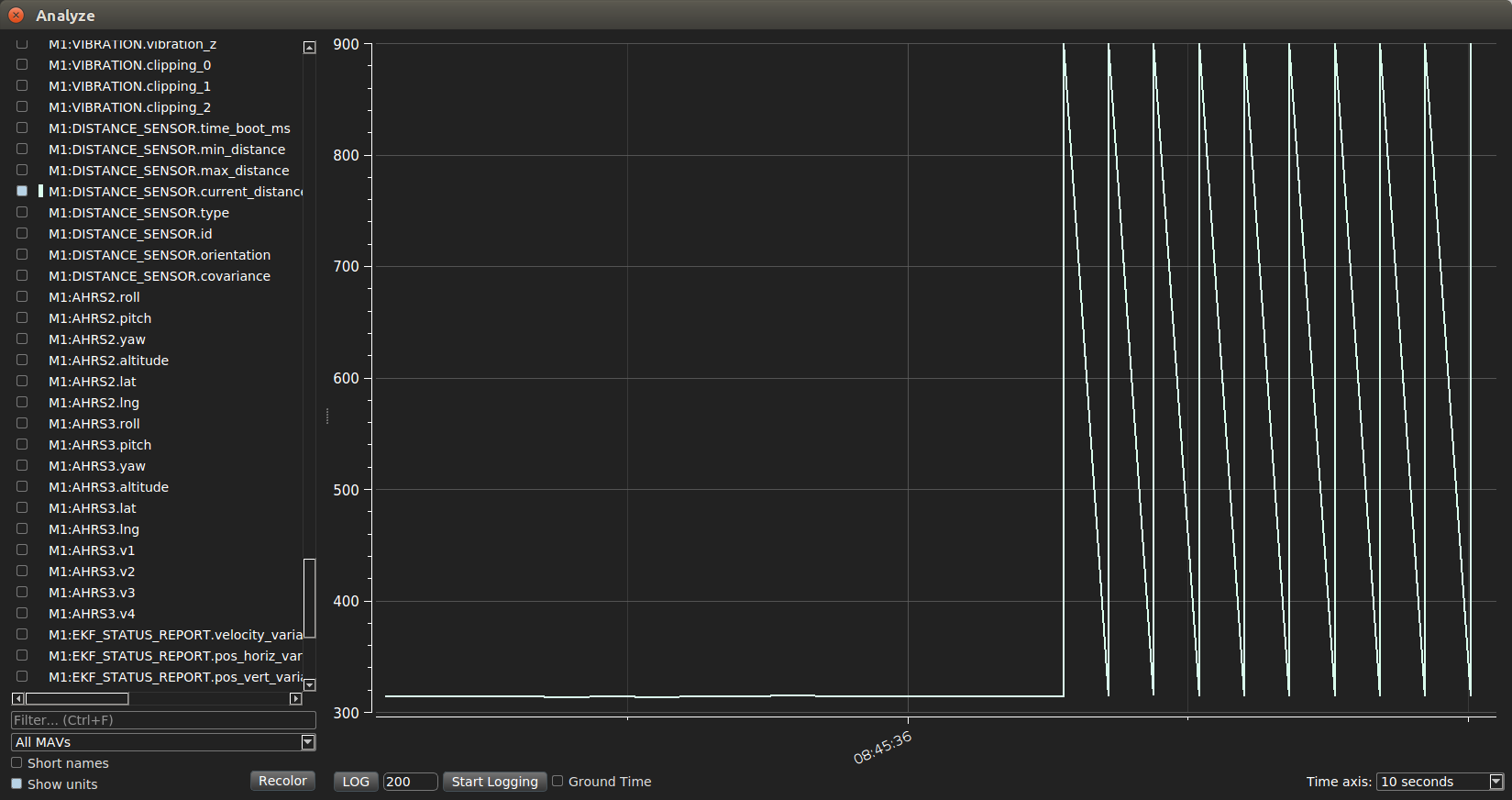
I was seeing exactly the same behaviour as @Javier_Beringola however when I test today it seems to be different. Now when I change orientation the distance message seems to oscillate between maximum value and the reading (only for orientations different than down):
In the above screen the flat line are the readings with orientation set to down, the first spike to RNGFND_MAX_CM occurs when I switch the orientation to anything else. Also the oscillations are always between the reading and RNGFND_MAX_CM: