You’ll also need the Alpha ESC reprogramming interface.
Yup, thanks for the reminder.
Update after flights today:
Drone felt unstable in althold so I neglected to advance to Loiter or attempt an Auto mission.
It appears to me that this might be a PID issue? Ive gone ahead and uploaded the two relevant logs
Im not sure why the flights from 2 posts ago felt so much better than the ones today as I haven’t changed the PIDs.
Any input appreciated.
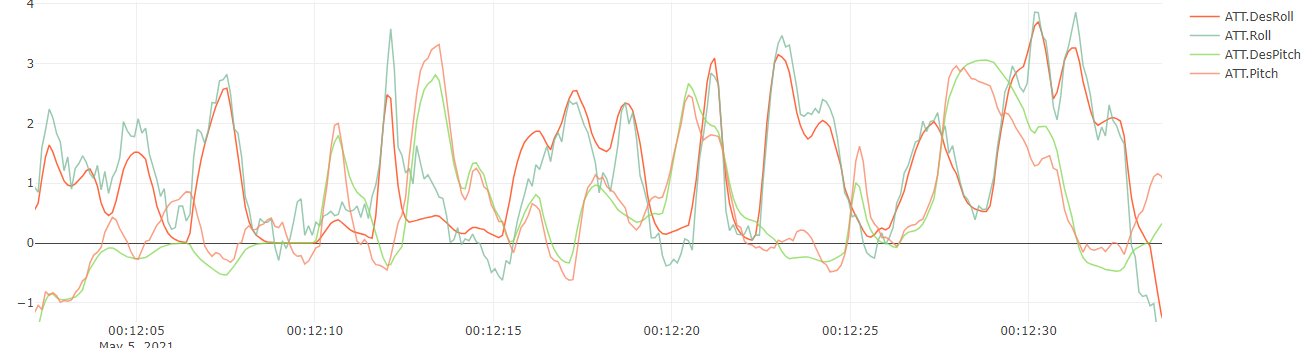
Flight looks to be bit smoother, the oscillation frequency seems to be approximately halved
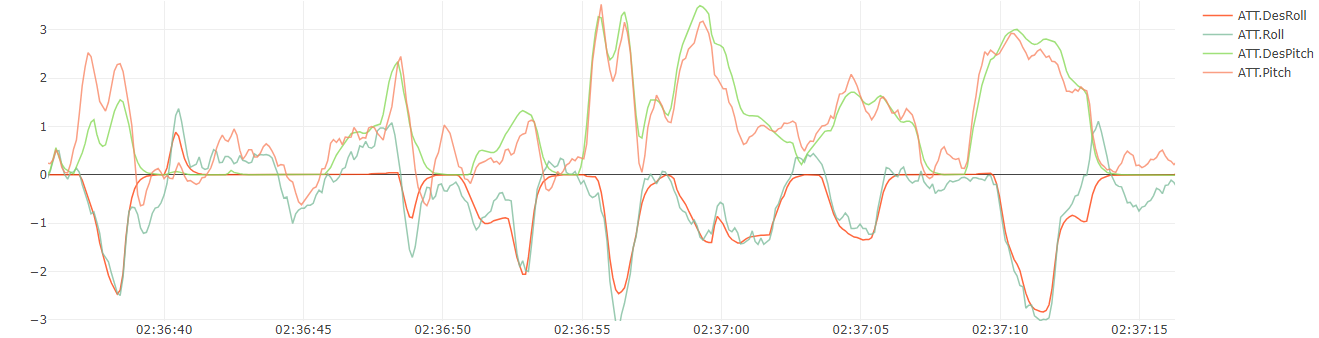
compared to earlier:
INS_HNTCH_ATT needs to be 40
and keep these during testing:
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,2
I think you’d be able to sneak the ANG P values up a bit and see if that unsteadiness smooths out even further:
ATC_ANG_PIT_P,5.0
ATC_ANG_RLL_P,5.0
or even 5.5 if it works.
And if you get the chance, test with an even lower MOT_THST_EXPO, but maybe better to leave it and wait for the new ESCs.
EDIT: looking at new logs now
1 Like
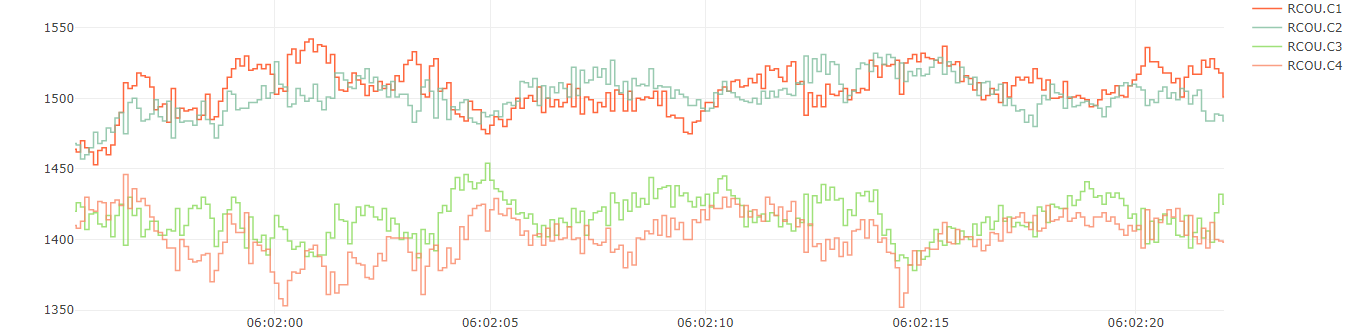
There’s still a physical yaw imbalance, but it was there in previous flights too. Motors 1 and 2 (CCW) working hard to counteract the CW motors. Arm or motor-mount twisted.
I cant see why it was any different to previous flights though 
I’ve seen the Yaw imbalance before, I will do my best to triple check level on props/motors before the next flight. I have also uploaded a video of the flights today that shows some of the oscillations and Yaw issues.
I’ll try and mitigate the yaw issue and make the Parameter changes above.
Thanks
During an Althold flight yesterday the same ESC desynch issue happened again where it appears a motor just stopped. I am now stopping all flights until the new Alpha ESCs arrive and hopefully fix this issue. Below is a link to the video and log of yesterday’s crash.
Before the crash, I had done a couple of flights in Althold and the craft seemed fairly stable. Then out of nowhere just lost a motor. Disappointing but hopefully the new ESCs sort this issue out.
1 Like
Hello. I’ve been dealing with the same problem for a while.
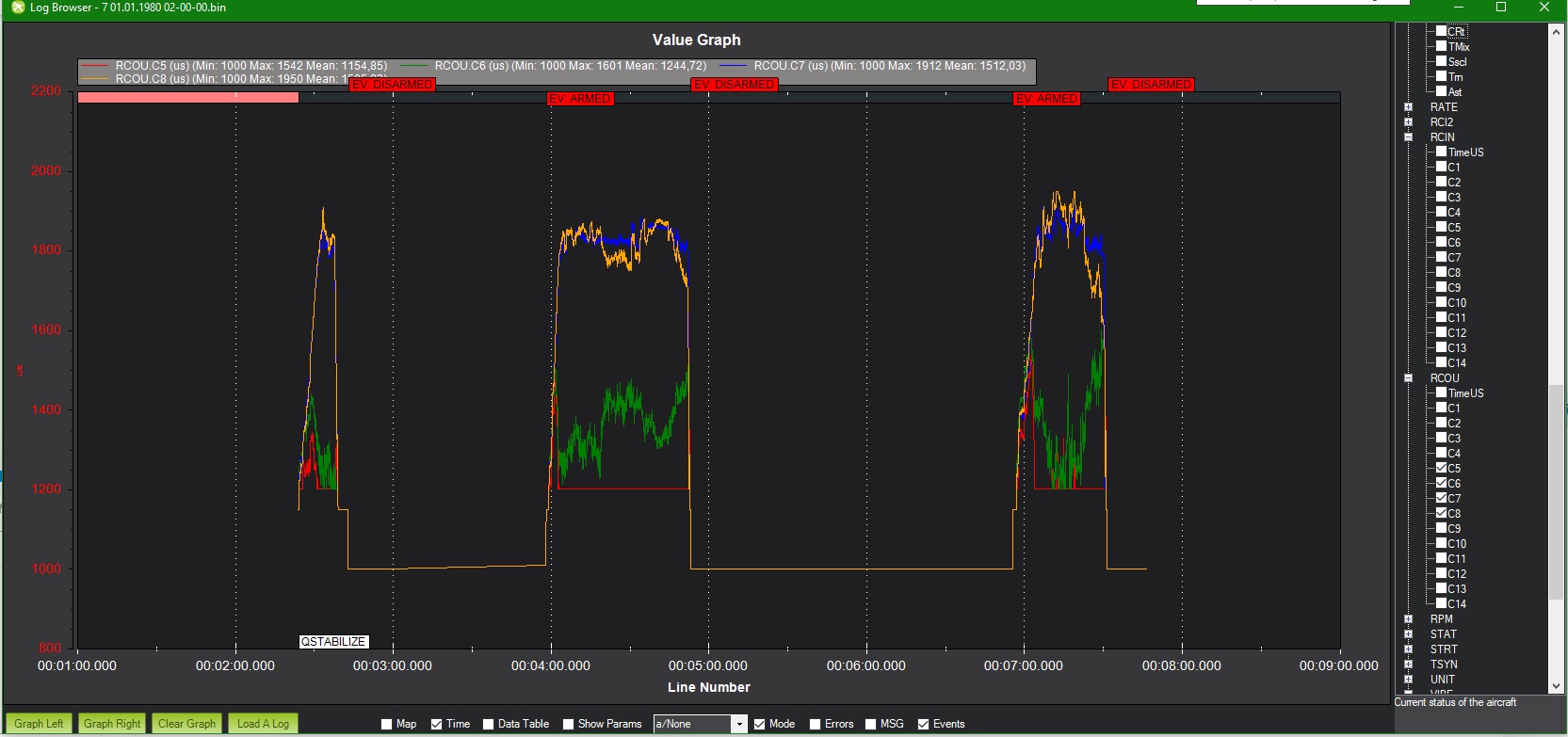
but frame is Quadplane. quad starts yaw movement after taking off. C7 ,C8 motors pwm is max.
motor: MN805S
ESC: FLAME 80A v2.0
battery: 12S LIPO
frame does not bend.
interestingly this problem always occurs from the moment it reaches 50 - 55 amps current value
here you can see 3 takeoff trying. (no yaw command from futaba)
did you solved your issue ?
Check your arms/motor mounts for not all being on the same plane, any twist will cause that yaw issue.
Since previous posts in this thread I’ve heard many more stories of issues with both Alpha and Flame ESCs and there’s evidence to backup the stories.
1 Like
thank you @xfacta
related topic (as you mentioned).
I have 2 frame (VTOL). this problem doesnt occur on old frame. So i mean frame twist problem need to be on old frames too. all vtol motors alignments are straight , measure with spirit level , but i will check again . changed ESC’s with news and I will change all ESC’s signal cables and power cables for double checking on new trouble frame.
Could it be another problem or how can I detect if it’s an ESC issue.
Solved:
solution
change frame type X to H on pixhawk.
Hello All, I am building a quad with DJI E5000 powertrain (28-inch props) and want to confirm what value of MOT_THST_EXPO shall be used for this powertrain.
@xfacta the Initial parameter excel suggests 0.79 for 28" prop and also 0.2 for T-Motor Flame ESC. I am not sure if the DJI E5000 have a flame ESC or not, so what value should i use?
@ThePara Could you please confirm the MOT_THST_EXPO you used for this Hexa?
Thanks in advance ![]()