I think , here. I don’t know ,I think d is too little…
All that was done was to set the Pitch parameters, which were at default, to the Roll parameters (which had been auto tuned) equal and drop the D-term because there were “failure to level” messages. Standard tuning procedures.
did you mean this message
[00:03:40.6]: AutoTune: failing to level, please tune manually
Yes. Commonly seen on craft not tuned well enough for Auto Tune to run.
@Ilya_Smolnikov please follow the sequence of processes that we are advising. Otherwise you will probably crash a couple more times.
Today I completed a flight and it was successful. I flew in eights. I was hovering in althold and doing yaw and pitch tilts, but there is a problem because I didn’t set the setting that separates the logs for flights and I have one big log, can it be divided somehow?
I turned on auto-tuning at the end, but not for the purpose of setting up the Drone, but to drain the battery faster. They are new and I need to run them. After a few cycles the charge discharges.
althold period 240 sec - 300 sec
tilts p and r period 420 sec - 480 sec
mag 8 period 510 sec - 720 sec and 780 - 960
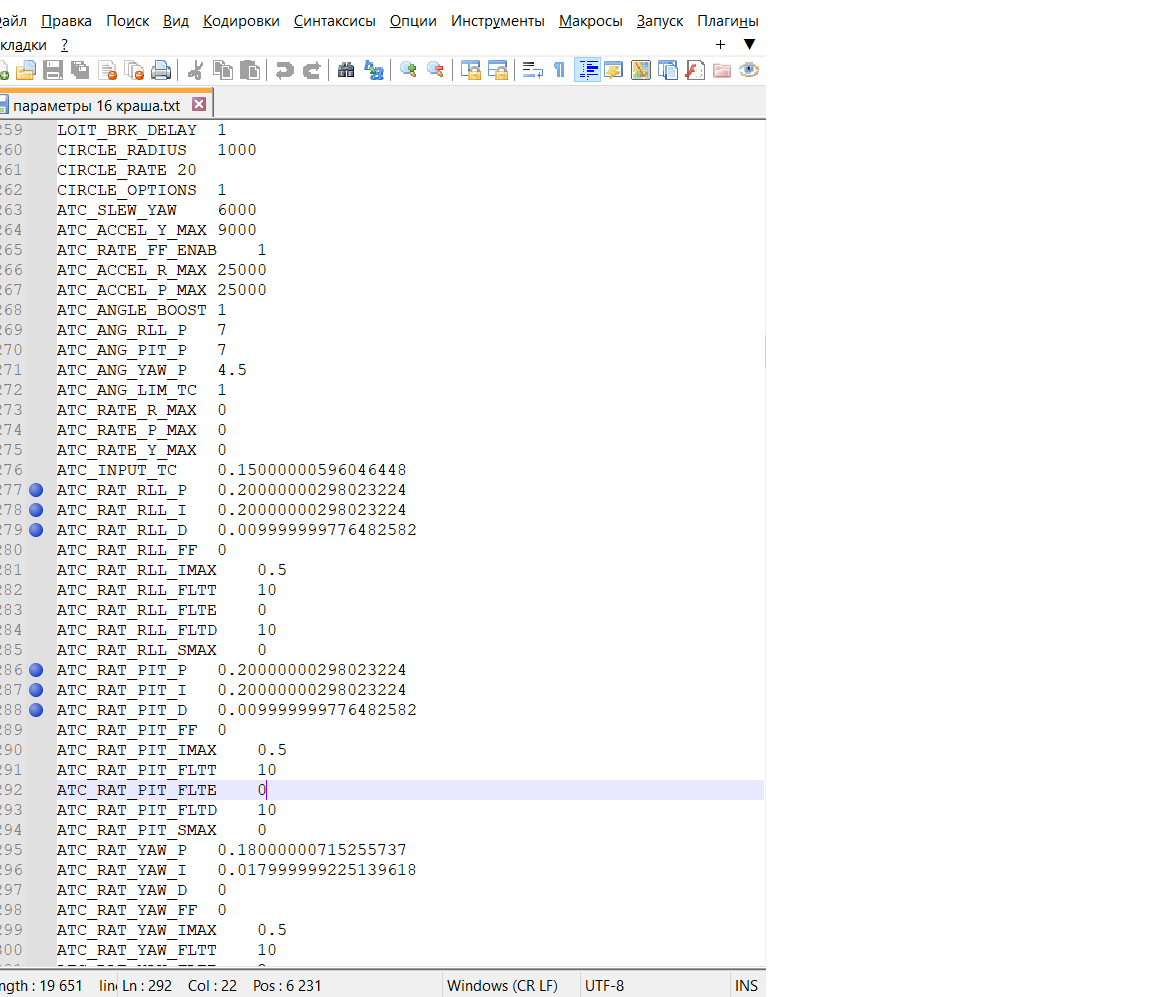
First up: there’s a lot of parameters to adjust here, mainly for the compass. To avoid mistakes do this:
- Copy/paste all the parameters from in here into a notepad text file
- Save As “updates.param”
- in MissionPlanner, Full parameter list, Compare (or Load from File)
- select the updates.param file and a dialog is shown with all the parameters that will be changed
- ensure all are selected and accept.
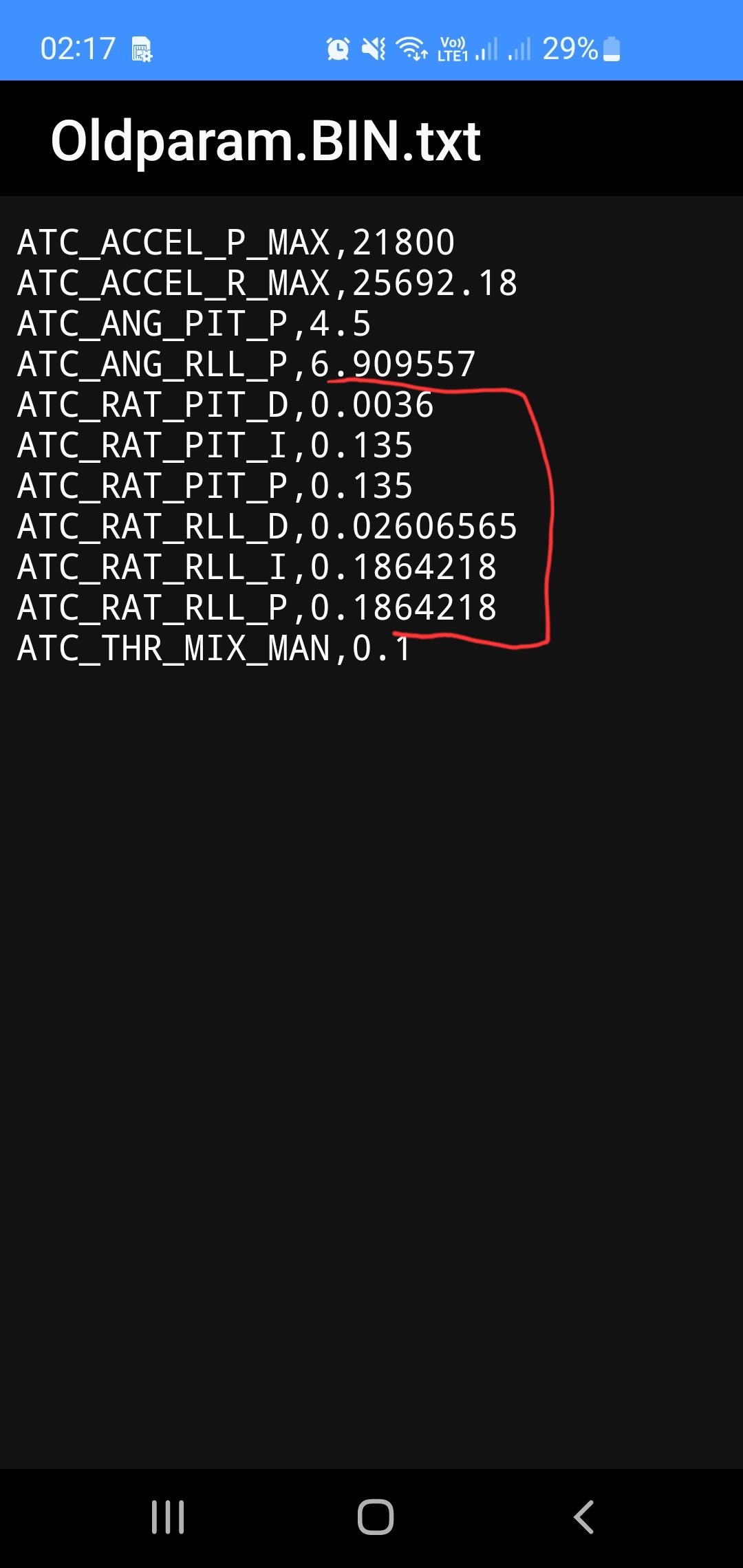
Form the log
Some Autotune completed OK but the changes were not saved because not all axis completed.
You can now set these:
ATC_ACCEL_R_MAX,23838
ATC_ANG_RLL_P,5.925
ATC_RAT_RLL_P,0.173
ATC_RAT_RLL_I,0.173
ATC_RAT_RLL_D,0.0236
and set all the same for Pitch
ATC_ACCEL_P_MAX,23838
ATC_ANG_PIT_P,5.925
ATC_RAT_PIT_P,0.173
ATC_RAT_PIT_I,0.173
ATC_RAT_PIT_D,0.0236
While we are there, lets make a guess about Yaw:
ATC_ANG_YAW_P,3
ATC_RAT_YAW_P,0.50
ATC_RAT_YAW_I,0.05
Adjust these for the harmonic notch filter:
INS_HNTCH_FREQ,33
INS_HNTCH_REF,0.13
INS_HNTCH_FM_RAT,0.7
This will sort out the compasses:
COMPASS_OFS_X,55.34330004220945
COMPASS_OFS_Y,187.41306988503388
COMPASS_OFS_Z,497.20718476462645
COMPASS_DIA_X,1.1210799507624722
COMPASS_DIA_Y,1.0507353142817253
COMPASS_DIA_Z,0.8281847349558022
COMPASS_ODI_X,0.002056212977255487
COMPASS_ODI_Y,0.06877858835780976
COMPASS_ODI_Z,-0.026362271931107954
COMPASS_MOT_X,0.37905760045741427
COMPASS_MOT_Y,0.6638030507058003
COMPASS_MOT_Z,-0.43363082053955754
COMPASS_SCALE,0.9605741897022542
COMPASS_ORIENT,0
COMPASS_OFS2_X,-224.60871886354244
COMPASS_OFS2_Y,-6.455473477733184
COMPASS_OFS2_Z,193.43052886061736
COMPASS_DIA2_X,1.0918469309997434
COMPASS_DIA2_Y,1.0433712516910614
COMPASS_DIA2_Z,0.864781817309196
COMPASS_ODI2_X,-0.020288505987551664
COMPASS_ODI2_Y,0.08866568401244344
COMPASS_ODI2_Z,-0.09669785422876555
COMPASS_MOT2_X,0.11820598476034012
COMPASS_MOT2_Y,-0.2067274218969909
COMPASS_MOT2_Z,0.16267509560638868
COMPASS_SCALE2,0.9378745507465093
COMPASS_ORIENT2,0
COMPASS_MOTCT,2
Do a new test flight to confirm everything is OK, but just hover for less than a minute then land and check motor temperature. If the motors are hot change ATC_RAT_RLL_D and ATC_RAT_PIT_D to half of their new value. Otherwise launch again and give it a good test.
Report with your observations and a new log.
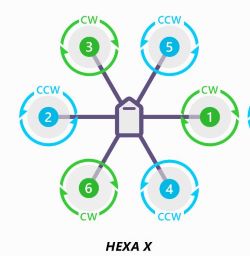
Thanks a lot! but I think the same PIDs as for roll will not be suitable, hexa x with 6 motors has a non-proportional distribution of motors, 3 for roll and 2 for pitch
That’s ridiculous.
What does the 6th motor do?
What’s non-proportional about this?
I agree for hexa, they are a bit odd at times. Pitch is not as misbehaved as roll so you could set pitch half-way between the old pitch values and the new roll values.
Like these:
ATC_ACCEL_P_MAX,23838 //same, it will be near enough
ATC_ANG_PIT_P,6.425
ATC_RAT_PIT_P,0.154
ATC_RAT_PIT_I,0.154
ATC_RAT_PIT_D,0.0136
Yesterday I stopped auto-tuning because the pitch started to sway
it is now clear ?
I’m not sure what you are trying to show here.
I am reasonably familiar with hexacopters, and even large ones.
While Roll has a motor on each side a long way from the roll axis, pitch has twice as many motors but a shorter distance from the pitch axis. It’s not very easy to predict in what proportion they will act or require different PIDs because it will still be somewhat dependant on the ESCs, motors and props and weight distribution.
The values I gave should be OK to use, since I checked in your log and pitch was not deviating from desired as much as roll was. At least it will be a safe place to start for the next round of autotunes.
Until Autotune is completed and new values are saved, you are still operating on the old values.
So when Roll Autotune started, pitch was still using the old values even though it had completed and found new/good values.
I wrote this for Dave, an answer to his question about what I was talking about. I’ll try to adjust p but I’m not sure if it’s safe, r didn’t rock the drone as much as p yesterday.
No. I don’t see the point you are trying to make.
In order to swing the drone along the roll axis, you need to increase the thrust on three motors and decrease it on three. in order to swing the pitch you need to increase it on two motors and decrease it on two. or so, 6 motors are used for roll control and 4 motors for pitch.
Today I completed auto-tuning successfully! there was a slight constant wind of about 1 m/s and I think because of this the drone was blown away, often it was necessary to return it back, but the auto-tuning was completed successfully. The only thing before tuning is that at the end of tuning in loiter mode there is slight shaking, in stabilized and althold mode everything is fine, I don’t understand where this comes from
ATC_ACCEL_P_MAX = ATC_ACCEL_P_MAX x (min_TOW / max_TOW) Guys, please tell me on your fingers! right after the fact, how to calculate this matter. I just can’t understand. the problems of translation into another language