Thanks! I figured it out just before I saw your last msg. If you go to the CLI interface and enter DFU and reboot, it works.
Got it updated. Now I’ll just turn it into a joystick.
Thanks! I figured it out just before I saw your last msg. If you go to the CLI interface and enter DFU and reboot, it works.
Got it updated. Now I’ll just turn it into a joystick.
NEXT QUESTION -
I need at least 6 analog channels. The board has 4 PWM inputs, and absolutely no mention of PPM. Can I get more than 4 channels of joystick, and can I use a PPM receiver?
I figured part of it out. In the BETAFLIGHT CONFIGURATOR, I set the input to PPM. I connected my PPM receiver to RC Channel 1. My PC recognizes BETAFLIGHT as a joystick, but I get no response on any of the channels.
So - where do I connect a PPM receiver? And are there any special settings?
I upgraded the firmware in the board, but there was no option for F4+OSD, so I simply chose “Betaflight F4”. If that won’t work, please tell me what you used.
I saw your controller had a pin labeled “RC”. I connected my PPM signal there. That didn’t work. Then I went into the configurator and set the radio type to PWM. I connected up 3 channels to the controller, and set my radio to PWM. That didn’t work either.
I need this to work with Mission Planner.
I think I finally got it working. I found a website that gave some of the information. That, plus your photo made all the difference (my board has virtually no silkscreen). Thanks!
I’m using a Logitech extreme 3d pro joystick for years and I’m not sure what you need that it doesn’t have.
As anyone tried this Simulator RC ?
I prefer this option over a standard RC dongle because there is no RF signal generated.
… ne reference whatsoever on the web… except for a bug report… Nope , never mind
I solved all my problems by adding a PPM receiver to a TEENSY 3.2 processor and wrote the code for it. The TEENSY has a USB port that I plug into my laptop. The USB port powers it all and it is really small.
Now, my normal transmitter binds with the receiver which sends PPM signals to the TEENSY. I emulate 6 analog joystick channels. So I get Pitch, Yaw, Throttle and Roll + MODE + Spare wirelessly using the same remote I use for 2.4GHz control. The whole setup cost less than $50, and I put it into a 3D printed case.
I currently have an FrSky X20 controller, and my problem is that the Windows Joystick driver is a very generic one, and wouldnt allow me to remap any of the other switches to the one I need. I figure I may have to write my own driver but Im not sure how the protocols work here.
Do you mind sharing more information on how you manage to get this working? I am trying to interface my remote controller via USB to Mission Planner, and with your method, how exactly do you ensure that the application (or even Windows) you are using recognise the USB you use?
You can use “joystick gremlin”.
Basically it creates a virtual joystick, and it can merge multiple hardware joys into one virtual.
https://whitemagic.github.io/JoystickGremlin/
Great, I’ll try those!
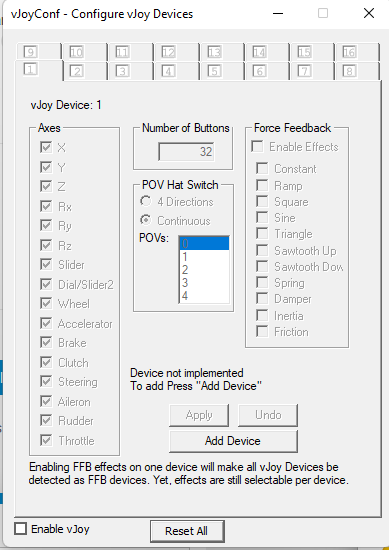
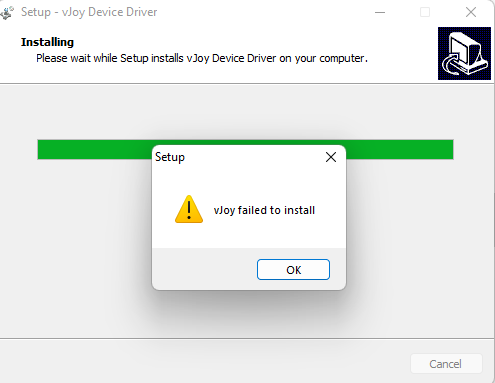
Hi! It works like a charm! I am currently just using vJoy 2.1.9, and everything is working fine but I happened to need more than 8 axes in which I then find out vJoy 2.2.1 provides user with 16 axes! I tried to get it working, but first I was faced with this installatation error
Then, when I try to configure vJoy, everything is greyed out and I cant seem to get anything to work ![]()
I had the same exact issue as this guy here. Does anyone know whats the workaround for this?
I am currently using Windows 11. The vJoy version I downloaded was this one
Mission Planner seems to have supports for multiple axes as well
So I assume, if I can remap my controller through vJoy and feed it into Mission Planner, I could configure it according to my controller
This is a good companion for my 4G telemetry/control/FPV setup. I always had trouble getting Windows to handle more than 4 analog channels. I use at least 6, the usual 4 plus MODE and camera control. I got it to work but was it very tricky to set up. This program will help.
I wrote the code for a Teensy (ver 3.2) processor that makes it look like a joystick. I then connected the Tensy to a 2.4GHz receiver that receives signals wirelessly from my standard hand-held controller.
The TEENSY’s USB port plugs into a USB port on my net-connected (4G) laptop, running Mission Planner.
If both the laptop and the flyer have 4G access, I have basically unlimited range.
If you are interested in how I did this, check out my web page https://calmultirotor.com
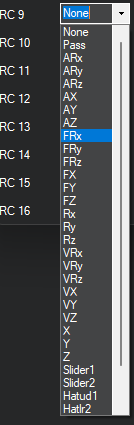
Found an alternative that allows me to use all 16 axes:
thanks to ArrowMaxGithub