Updated to the latest Rover Beta firmware and all the settings updates as instructed above.
Did 4 passes of the same mission:
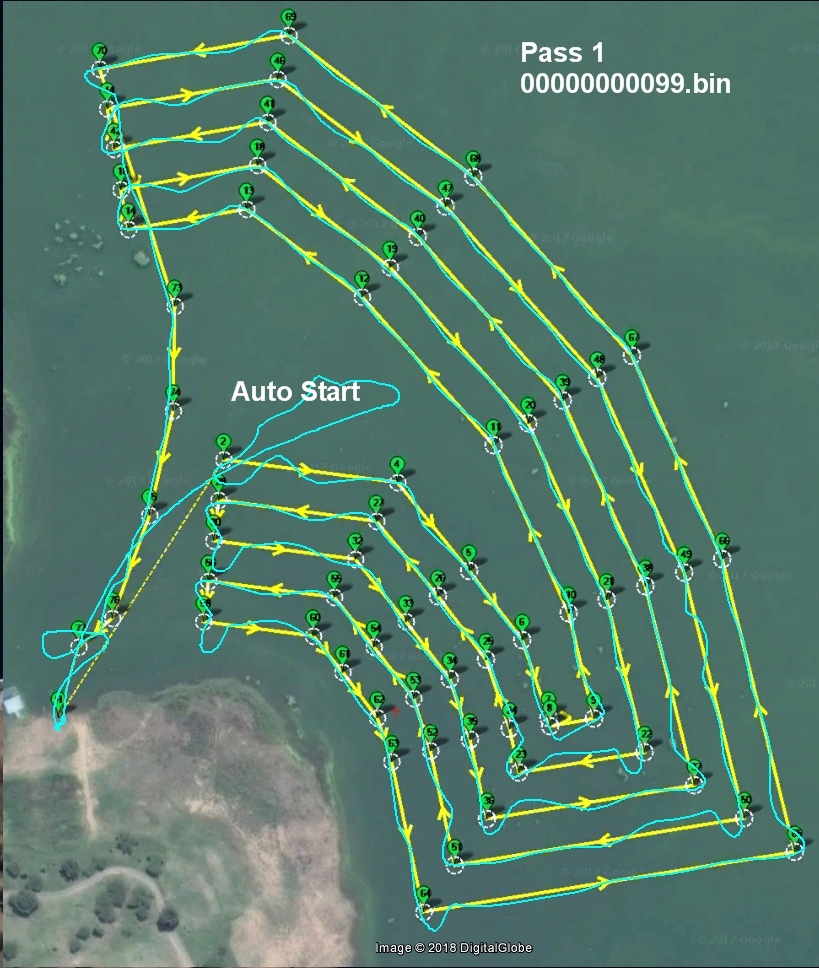
Pass1 -

Pass 2 -

Pass 3 -

Pass 4 -

Log File for Pass 4 - https://www.dropbox.com/s/q034qyi3kli8bs6/00000102.BIN?dl=0
Video 1
Video 2 - Look at the crazy angle it took here! This is very aggressive and potentially a big failure in rough conditions!
Comparison between yesterday’s settings and today: An improvement for sure, but the excessive throttle after the waypoint is still a big problem.
