I wonder what would happen if servo is working to hard and starts to over heat. Water puts a lot more force on rudder than air does on plane rudder
I also thought of that Kurt, but the steering is driven by a heavy duty truck wiper motor with a 45Amp H-Bridge with a fan. As Thermography is my primary business I took dozens of Thermograms as it came in and everything is running cool, even when the fan is turned off.
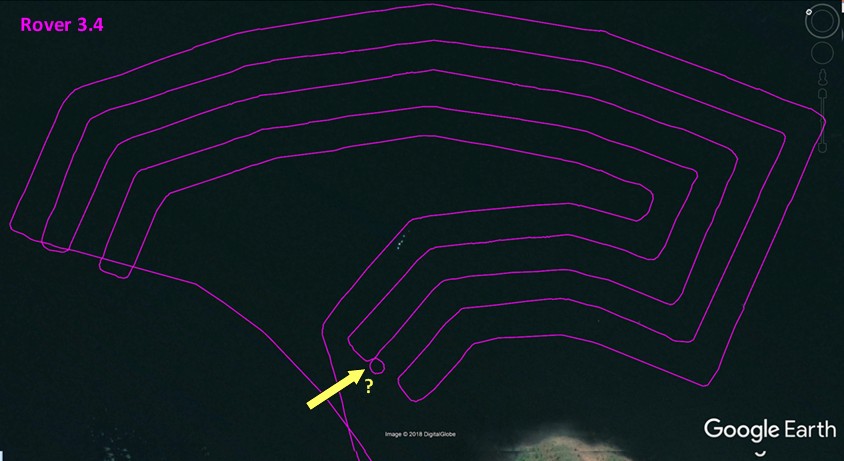
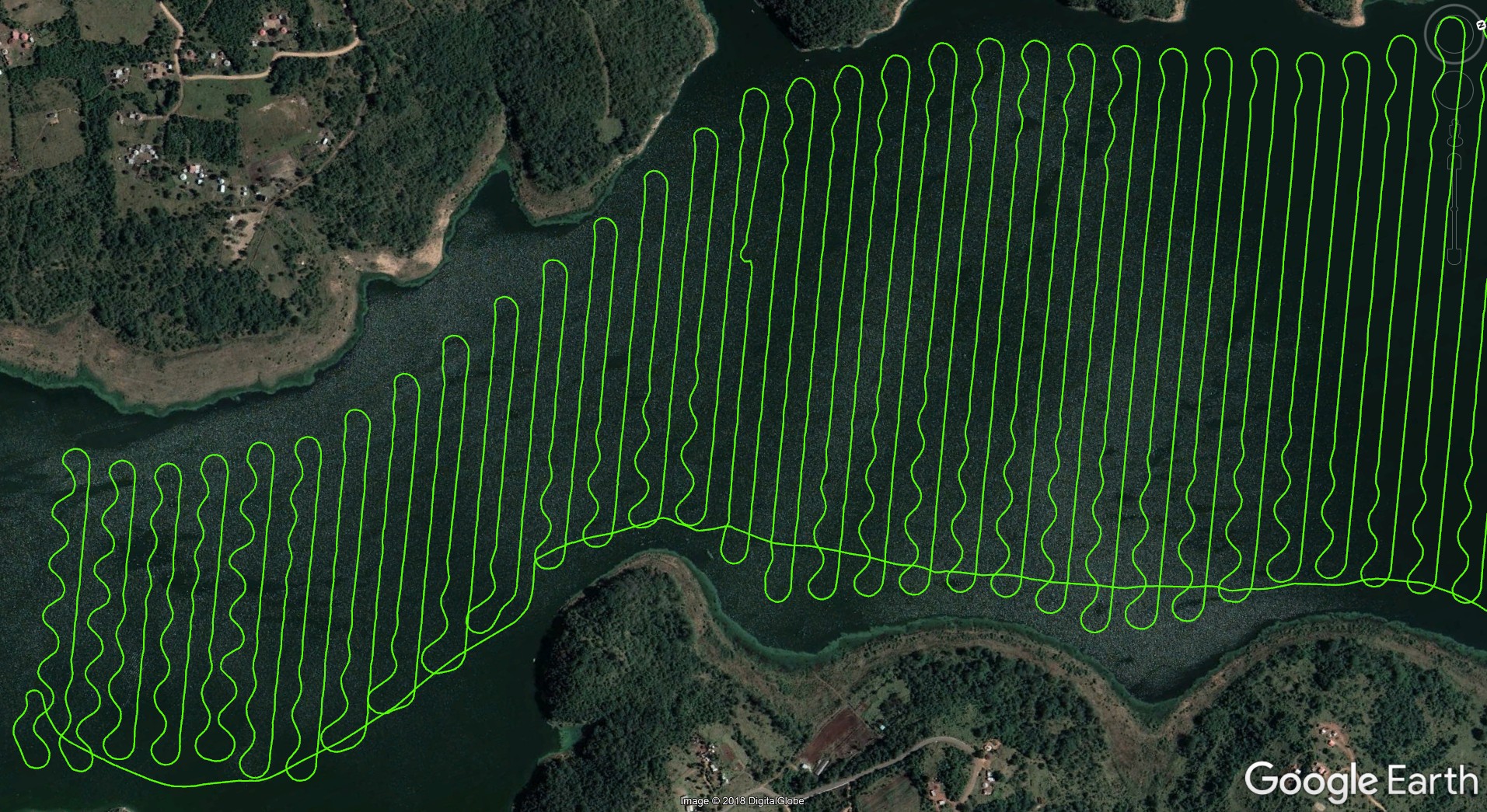
We come back to the question - Why is the ‘wobble’ the same in the same spots, almost identical. It is as if the Mission Planner is telling it to do exactly that.
I used to have the same problem with my DJI Phantom back in the early days with DroneDeploy, it too used to go wobbly, but they have sorted out all those problems.
What I find strange is in the cove part of the map its track is perfect. Any chance the tracks in which the boat is wobbly are in a downwind direction. If the wind was going left to right in your picture the boat when headed away from the cove would encounter a “tailwind” that would probably be stronger the further away from the cove. Could be the throttle on the boat would vary a lot going downwind and cause steering issues using a thrust vector type of steering. I find it a strange coincidence that the wobbles are when heading away from the cove and start about the same area left to right. Were the environmental conditions different between track 1 and 2?
Yes, it certainly is a strange one, I see what you mean.
I have tested it in multiple weather conditions, and that seems to have little to no effect on the heading of the craft.
2 Likes
To me that picture of the boat tells me its steering is all about motor thrust. It planes so there is little of the boat in the water to give it heading stability. Its course heading is totally reliant on thrust from the motor. Just my 2 cents. Nice boat.
David, the hull is actually a displacement hull, that of a surf kayak type design, but yes, it is quick and appears to be planing, but it is not. Thank you for the compliment.
Hi,what servo do you use?
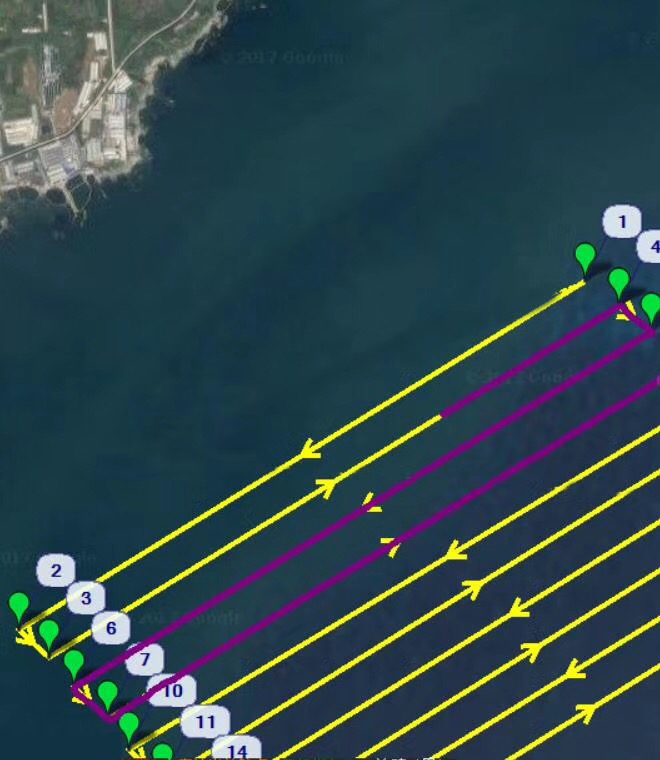
I tested this boat on coastal waters, if there is big current or wind, the path will in “S” shape.


2 Likes
another test.
The problem I encountered is the the boat can not stay stable speed when there is a current or wind, it can not accelerate to CRUISE_SPEED.
I think CRUISE_THROTTLE is not necessary. when there is current or wind, the CRUISE_THROTTLE is incorrect. is it possible to do like car’s Cruise control, do not use CRUISE_THROTTLE .
Another problem is that the speed(displayed in mission planner) of boat fluctuated seriously. maybe the speed calculation has some problem.
2 Likes
Hi Ben,
This is the first time I have seen somebody else using a proper outboard motor, very nice!
What steering / servo system do you use?
Do you have a video of your craft?
What is the top speed of your craft?
Regards
John Easton
FishTec
South Africa
Ben,
If you can upload a dataflash log I can have a look…
Hi, i will find the log and upload.
Hi Fishton,
I used a customized servo(200kg/cm,±45°,0.23s/60°), and i think it’s suitable for outboard motor.

Have been doing some more testing with the new craft …
It appears to be a over run on the waypoint then a desperate attempt to get back on track.
The only solution I can see going forward is to drop the speed long before reaching the waypoint due to the speed and momentum of the craft.

Here is a video of the craft to give you an idea at speeds between 14-19kph
1 Like
Very nice. Looks like a very stable boat
Thank you David, yes, she is very stable, but with a bit of give where it needs it
First 6 hour test today calm conditions …
1 Like
Is there anyway you can outfit the boat to keep the outboard stationary and put rudders on the outer hulls? Your picture of the track looks better than others I’ve seen. I’m still interested in why it is worse in one direction than the other. Maybe a dagger board in the main hull would smooth things out a bit. Once it gets going straight it looks good. But then again it has huge problems in the cove. I think this vectored thrust steering with a single screw has some problems. Not Ardupilot problem but basic Naval Architecture problem. Once it gets going straight, for the most part, it hold course. But your boat should behave better than this to be considered working properly
David,
If there was any kind of basic Naval Architecture problem with the concept of the design or propulsion, it would be a constant problem.
The fact that the craft was capable of this extremely accurate trail, except for a small glitch on a single waypoint when testing the Beta Rover 3.4 tells me there is nothing wrong with the hardware or craft itself.
I have total faith in Randy, and we will get to the bottom of this.
The single biggest problem with Rover firmware and my craft is MOMENTUM due to the size and speed of the craft. Coming right off the gas at least 30m from the waypoint I believe is going to be the solution.