I just need something that works. Hope to get the FF6 dialed in. It’s been a rough few days
yep! I’ll pop over to the FF6 discussion as soon as I can to help out. I still haven’t measured the elevon deflections on mine
if you do add a variable pitch fwd prop then I’d be happy to work with you on adding support for it. You could actually fly with it now with prop-pitch on a knob on the TX just to try it out, then we could work on the right control algorithm after some initial testing
1 Like
If it includes an method for automatically determining Carson’s speed best range cruise, I’d be very interested in participating in collective forward propellor development and testing! ![]()
Beautifully made quadplane Ryan! ![]()
Hi Ryan
As usual I have a ‘few’ questions to better understand the intention of the idea. ![]()
I was wondering what the application goals are and what the expected useable payload and capacity will be for that particular use case? For example is it for loitering surveillance of a mostly stationary subject, or long range for collecting aerial photography of an area, or something else?
Am I right in thinking the engine directly drives he propellor and a electric generator to charge the batteries in flight?
Given that optimal forward propellor performance is achieved by matching the pitch to best glide slope cruise velocity of the aircraft, and only creating enough thrust to overcome drag at that velocity, on aerodynamically sleek aircraft this typically means high pitch forward props, with the prop diameter mostly determined by the thrust required at cruise speed.
The issue with this is, as you have also pointed out, that high pitch props are not good for static thrust for climb or low speed acceleration. Further, unlike a electric motor with torque at low RPM and across the RPM range, the available torque curve of a combustion engine, is fairly ineffective at swinging a high pitch prop at low airspeed. Also the engine torque and resulting minimum fuel burn are hard to align with cruise if compromises need to be made for climb/takeoff thrust. As such variable pitch offers the engine some “gearing” to better adapt engine performance to flight dynamics.
It’s a common approach to design high performance/efficiency aircraft from the prop backwards, typically meaning that the engine needs to provide enough static thrust for takeoff/climbout. Typically this is at full engine load and RPM (which is also it’s maximum thermodynamic efficiency), and then they throttle back for most efficient fuel burn cruise at altitude. Compounding this problem is that small engines are not very efficient at partial loads. With a QP this can largely be neglected, in that the quad components provide “a endless runway in the sky at altitude away from obstacles”. However, they do not assist much in the way of providing forward momentum unless they tilt. (Which might be a viable option for the front quad motors on you setup to assist takeoff/climb as well)
Instead of a variable pitch prop on the engine that has some of it’s own inadequacies, to overcome this I was wondering if you have considered using the attached electric generator as a motor to assist the engine in accelerating the aircraft to cruise, or to climb with a high pitch prop, or at a minimum to reduce the generator load dynamically depending on rate of climb? Or alternatively decouple the prop entirely from the engine and use only a electric motor for the forward propulsion.
The benefits of this “range extender” instead of “electric assist” configuration, at the cost of adding one extra electric motor and ESC would be:
- The engines best fuel efficiency RPM could be matched to a optimised generator and load,
- resulting from the completely optimised forward motor and prop combination determined by thrust required at Carsons,
- regardless of thrust required by the aircraft for climb or forward cruise
- Running a optimised engine/generator and forward electric motor propellor combination, will more than offset the electrical losses resulting from conversion of electrical generation and propulsion
- The engine could be run at max power all the time including on the ground or in hover increasing hover times, without spinning the forward prop (running the engine at near WOT RPM results in best fuel conversion eff.)
- The engine/generator could be downsized to only produce enough power to maintain forward cruise (I think you’re currently running a 1.6kW, 1.6kg motor for forward cruise for a few hundred watts of cruise propulsion required by the aircraft, roughly what is your engine throttle setting or estimated forward cruise power required?)
- The engine can be placed anywhere in the fuselage to optimise airflow/cooling/CoG/tanks/Payload configuration
- Forward flight can continue without the engine running or it failing, to safely RTL on batteries, improving reliability and return of investment
 , or for periods where “stealth mode” is required
, or for periods where “stealth mode” is required - The ICE generator can be optional entirely. Assuming forward cruise at around 200W, you could install batteries instead of the tank, fuel and ICE saving some 5-6kg of weight. 5kg of 18650 batteries is 108cellsx10Wh= 1kWh of useable battery, resulting in 5hours of forward cruise without a drop of fuel used…

- I’m not sure what your hover amps are (without downloading a 1.5GB log - Nice!) but I expect it to be around 2000W at say 7g/W? So that would be around 30min of hover time on that battery pack, plus whatever hover time the batteries you have already for the quad setup on board. (2C is easy to achieve safely on 18650’s btw for hover)
- Battery only wihtout the engine will also considerably reduce NVH
Also do you have some type of propellor stop on the quad motors to keep the props out of the airflow? They look pretty big compared to your very sleek airframe, so might impact forward drag.
Regards
Sam
1 Like
Thank you all for the suggestions and comments!
@tridge That is a very impressive take-off and transiton! Especially considering that it auto weather-vaned ( I think) please do look at the logs when you have a chance. Variable pitch prop is something we have considered, and I appreciate that you would be willing to contribute code to make it available in Ardupilot.
@james_pattison Thank you, I plan to test that next session.
@skyveyor Thank you, the aircraft is of our own design. Keep checking this blog for more information on the development of Hybrid Project.
@JeffBloggs - This is a placeholder for when I have time to answer your inquiries. But short answer is YES, everything you asked has been mentioned or seriously considered buy us, and a couple these items are still on the table. Looking forward to discussing it with you.
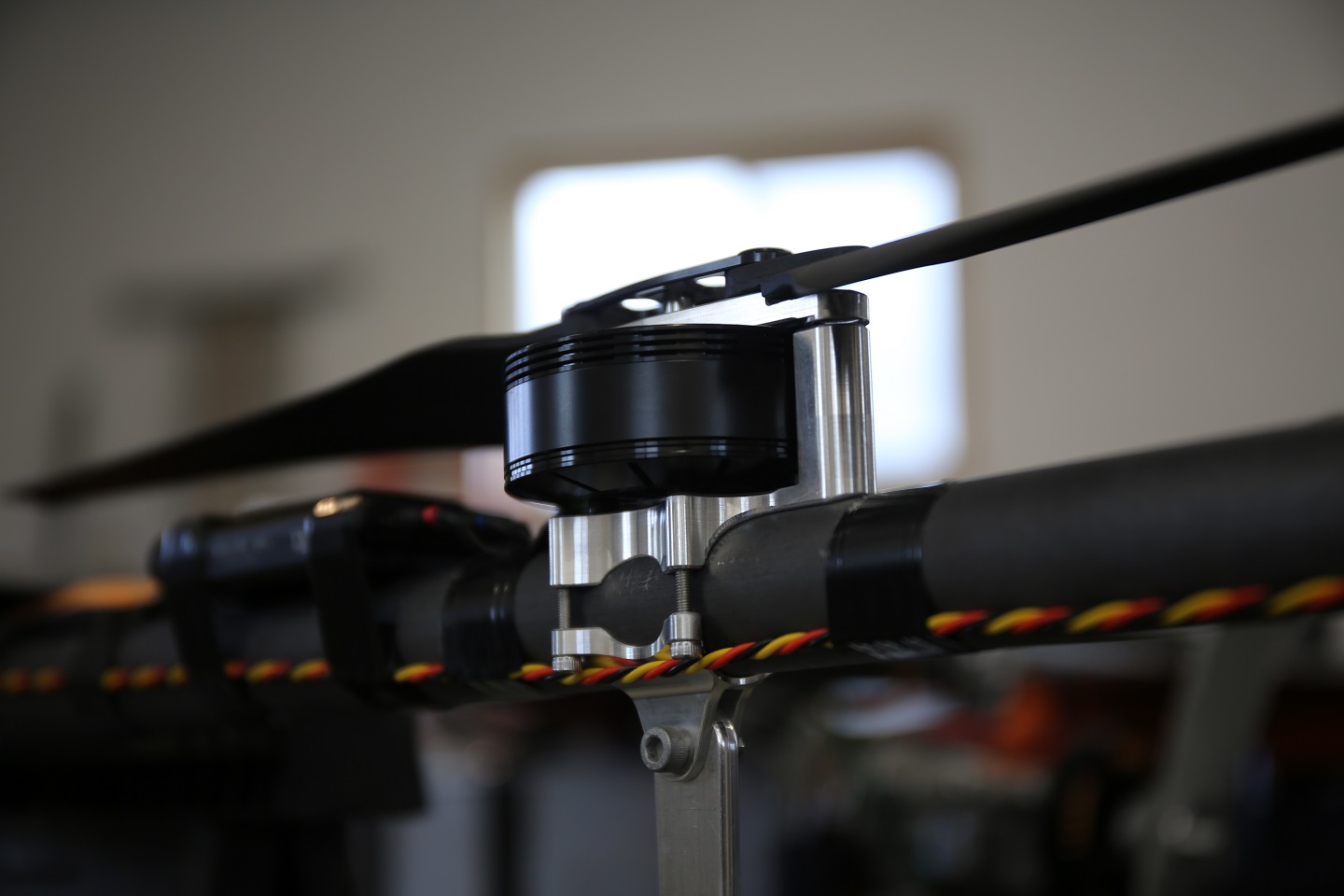
@JeffBloggs and @tridge Prop Alignment - Here and below, is a video of our prop aliment in action. (watch the R/H props at :45 seconds,The video was taken last winter and we were struggling a little bit with our transitions, as you’ll see) iThe mechanics are simple ( magnets ) and at the end of the trasition code we (Shane) inserted a segment that pulsed the PWM to the Q motors 5 times for an parameter adjustable amount of time (milliseconds). Props typically aligned when coasting to a stop or within 2-3 pulses, the pulse signal was sent 5 times by default. Tuning consisted of sending a long/strong enough pulse to rotate the motor, but not enough to break the magnetic attraction.
The results were positive and consistently lined all four props up every time after tuned correctly, but the code does not work with the upgrade to 3.8. We would be happy to contribute to the development this, most builders could probably integrate it into there aircraft with only a 3D printer, if the code was integrated into Ardupilot.
2 Likes
I quite like the magnet idea to retain the prop orientation, and then pulsing the prop to attach itself, but I was wondering how the prop is attracted to it? Is there a metal piece mounted on the prop? Do you then use the ESC brake to retain it at higher velocity or does the magnet suffice?
And sorry about all the questions and comments at once…no rush! 
Hello, I’m gonna try to start answering a few questions to take some of the load off Ryan…
There are 2 magnets on the motor bell under the propeller and 1 on the motor mount.
-Shane
3 Likes
Brilliant solution and execution! I love the work and detail design you’ve put into this. I was struggling to find the method from the photos/videos. Any idea on if it increases current draw at all?
The magnets are not generating energy but simply acting as springs.
The propeller will only catch if it coasts to a stop within +/- 20 degrees of alignment.
This is where the impulses come in.
There is no measurable loss, and to my understanding, no theoretical loss with the exception of additional aerodynamic drag.
-Shane
1 Like
Yeah ok, I suppose the attraction and repulsion forces should cancel each other out. But what about eddy currents though the aluminium? I suppose the hover times are limited so the effect might not be large. Do you then use the ESC to brake it to maintain position at higher speeds, or does the magnet suffice?
1 Like
The magnet works great!
Also no measurable loss with an amp meter and no noticeable difference in max rpm.
Hello, Another flight test day: Sample log

Photo by my friend and adventure photographer: https://benherndon.com/
While a lot of the time was spent tuning and observing our charge controller, I did test the following things as well:
- Upgraded and flew about 3.5 hrs on Plane 3.8.2
- After first flight , Disabled Internal Mag.
- Conducted Hybrid RTL Landings.
Observations:
-
Tecs.sp still looking healthy when over-layed on GPS.spd
-
More often then not I am flying in moderate to very windy conditions, yesterday average ground speed spread was around 20 m/s and peaked closer to 26/ms. It’s often hard to visually notice changes in flight performance. That being said the aircraft appears very solid and responsive in the air, and I feel that the basic pitch and roll tuning for this aircraft at its current weight and CG is pretty good.
-
Auto transitions and landings were very smooth maybe slightly better with the latest FW.
-
Vertical take off is difficult in Q_Loiter in high winds (for obvious reasons) and using the pusher motor to aid in position hold has been unreliable due to the idle thrust being to great for calmer wind conditions. For now my SOP has just been to launch the plane in Q_stabilize and let it drift down wind while gaining altitude. This does have a small up-side in testing because naturally some phase of the transition usually takes place directly overhead for easy observation.
-
Disabling the internal mag eliminated the constant “Bad Compass Health” message in the HUD. (See first Question below)
Questions:
The telemetry feed (mission planner) often shows errors in altitude and the heading indications of the aircraft model on the map are all over the place at times. The on board logs don’t show the sporadic changes, so I figure that this is an error in the telemetry link or ground station. Also, often commands sent from the GS don’t go through. I am currently using a TBS Crossfire with RC through Mavlink, and BlueTooth to my laptop.
So:
-
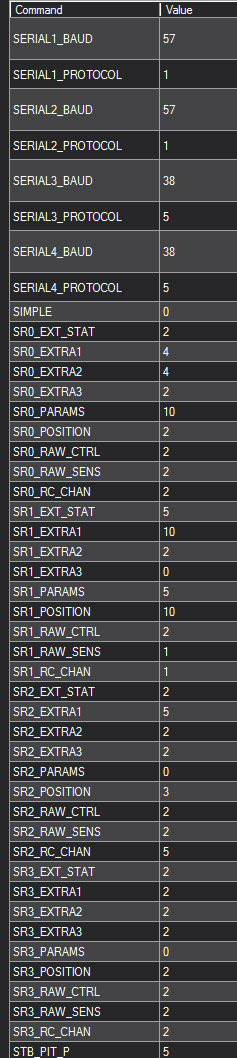
Where can I find information on how to set up the serial communication parameters?
-
Will that even help? I used the SR1 and SR2 parameters suggested by the Crossfire community and did not notice a difference. I also plan to try some different GCS’s and telemetry units
Also
3. What is the best way to determine/verify Mag health based of the .bin files?
As usual, Thanks for looking and any help/insights.
Ryan

Crossfire telemetry could explain the GCS anomalies. Whilst the serial port data rate is 56kb, one source has indicated that the over-the-air rate is only 12kb. I’ve no idea how it is down-sampled by the crossfire.
I have no experience with the TBS Crossfire, but it might be worth trying a standard 915Mhz modem set to see if the problem persists. These work fine for LOS : https://hobbyking.com/en_us/hkpilot-transceiver-telemetry-radio-set-v2-915mhz.html
For longer range BLOS I’d highly recommend RFD 900x Modem (HS 8517.62.00.90) - RFDesign which also supports PPM passthrough for RC control. These are the “default” radios used by most Outback Challenge teams, are also well supported by Tridge (so they remain compatible). From memory, in the 2016 event CUAV managed to maintain a RF link ground to ground over 15km or so, whilst the quadplane was landed at the remote site. PPM wiring diagram can be found here: RFD900x Setup — Mozzie 1.0 documentation
Thanks James, Ill look into it more.
Thanks for the links Sam, I have some 3DR units I will try first. I have been planning on getting a pair of RFD900’s for a while, I was not aware that PPM passthrough is available, that’s a nice option to have considering we would like to make our own AIO GS.
I posted a request for help in Plane 3.8 sub-forum : Near crash amidst multiple “EKF yaw reset” messages. Logs inside
Please take a look if you think you can help decipher some odd behavior.
On a positive note; Completed a couple really nice looking full AUTO missions ( my first! ) I was flying alone, but I managed to capture some video of an AUTO takeoff and landing I’ll post later.
(Radio is beeping because I have not touched it for 10 min.)
By the way, the improved transition into the final landing stage on 3.8.2 is buttery smooth compared to previous versions, great job Devs.
1 Like
JFYI with the RFD900 it’s only the “x” model that has PPM passthru, the others don’t. It also has multipoint mesh, so you can use a third radio as a relay etc.
I assume you mean “all in one ground station” with AIO GS?
For that we’re using Maverick on a pi Zero as a ground comms relay and are thinking of making some of our own PCB’s for it. With that we connect the RFD900x to the pi uart, FrSky RX and telemetry via the smart port to the RFD900x PPM (this gives telemetry back to the Taranis screen as well for the RC pilot), LTE modem to the pi USB and share the telem/LTE on the ground to the GCS’s etc, using the pi zero W wifi which routes mavlink of mavlink-router/mavproxy. Powered by 2s 18650’s this can last 4-6hours. Also has a RGB LED strip to emulate PXH LED on the ground and near the GCS, oled or eink display for showing critical messages, plus some buttons to do basic config and RTL without a GCS. The good thing is that this can go in a decent RF location, like on a mast and makes the GCS devices wireless so they can move around on the ground without needing to babysit the RF or cables. Well worth it, even if it’s just to cut down on the setup times. Just boot, connect and fly.
P.S. One more thing for LTE routing through the telco NAT, and in general, I highly recommend using https://www.zerotier.com/
1 Like