Notes from most recent test flights:
-
Suspect compass still unhealthy despite moving GPS /MAG to very tip of wing
-
Abrupt pitch-up upon reaching ARSPD_FBW_MIN in transitions.
-
Lots of interference from IC engine? Could be contributing to multiple issues?
Sample Flight Log: 0004.BIN
OK, Compass. I moved the whole unit to the very tip of an ugly, but functional RH wing I had laying around. Routed wires in twisted pairs to the FC.

Re-calibrated compass offsets in the middle of a field, still not great numbers:
X -396
Y 148
Z -31
Observing mag level on the Mission Planner tuning page shows a relatively stable base line of around 700 (isn’t that really high?) It fluctuate between ~620 - 800 under quad power and in flight.
Visually, the telemetry suggests that the aircraft is far more aware of its magnetic orientation. Yaw commands in hover are noticeably better, and auto transitions to initial waypoint seem accurate. Still see pretty bad toilet-bowl in Q_LOITER take-off. I’m not sure how to quantify the improvement (or lack thereof) in the logs so if anyone could shed some light on the that it would be much appreciated.
Pitch-UP Issue :
This is a recurring issue that is always there but often so bad in wind that the aircraft almost goes vertical.
The log posted above and these screen shots below likely paint a better picture than I can describe with words.
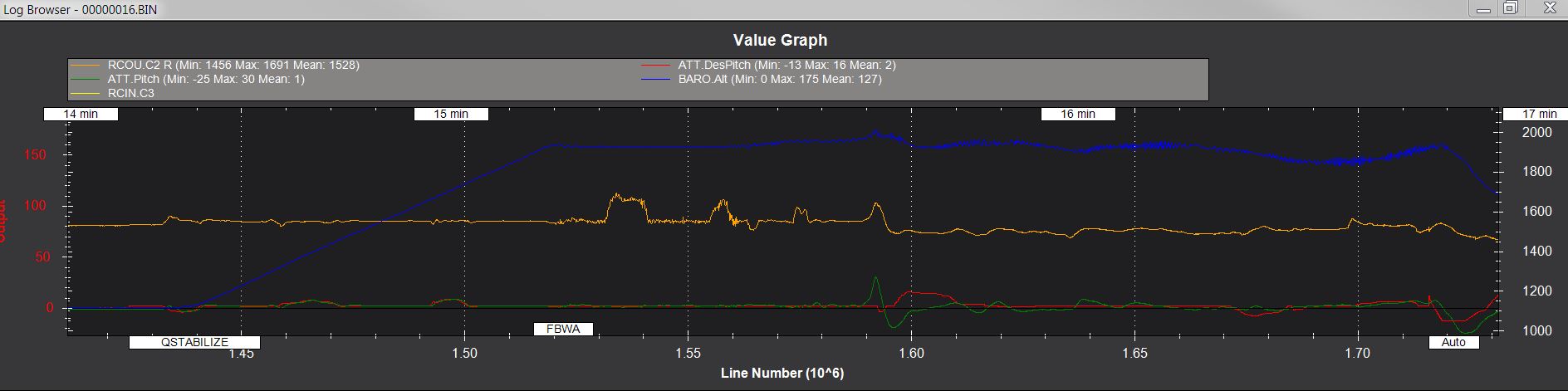
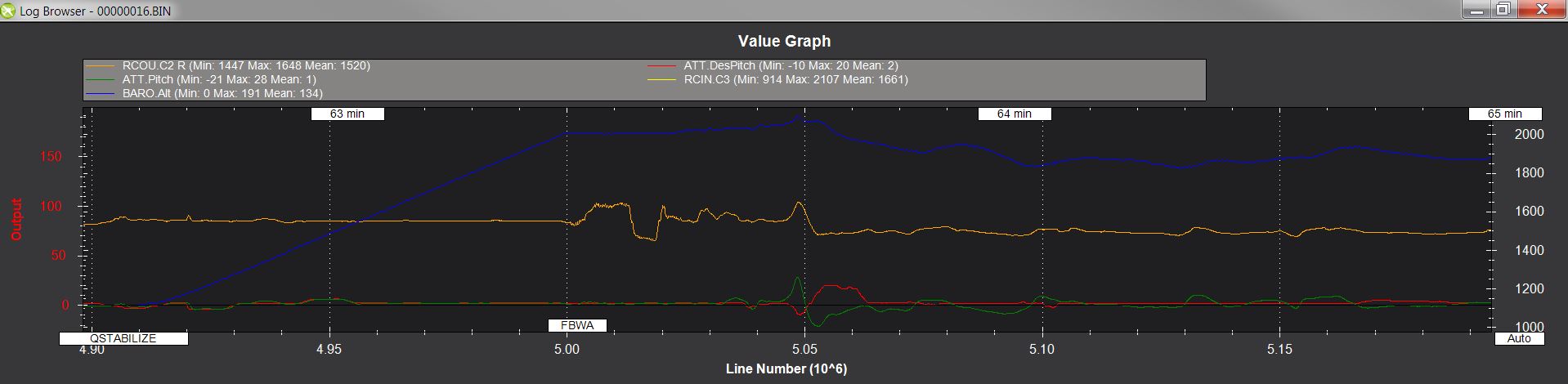
As far as I can tell, the pitch is an entirely un-commanded output on channel 2 (and 10 - not shown).
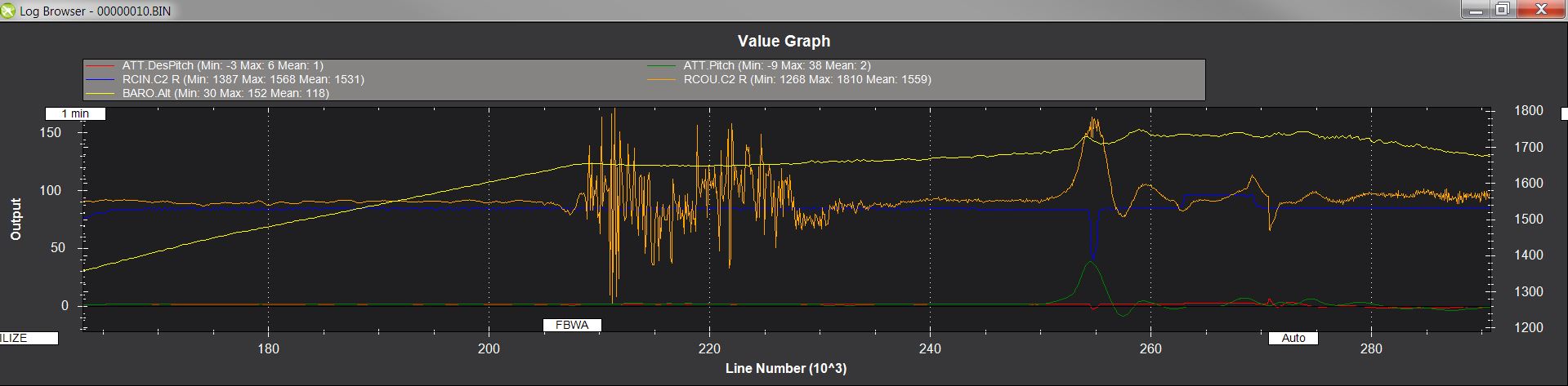
That interference on the last screenshot is quite troubling and leads me to my final note:
**Gas Motor Interference and/or Ground issues?
The RH tail servo used to jitter when the gas motor started (I suspected ignition noise), but that went away with shielded servo wire.
Could noise in the long tail servo wires show itself in the RCout as seen in the logs? Or is that different issue form within the FC?
As usual, any help is appreciated, I’ll keep poking around in the meantime.
Till next time,
Ryan