lida2003
May 21, 2024, 10:09pm
1
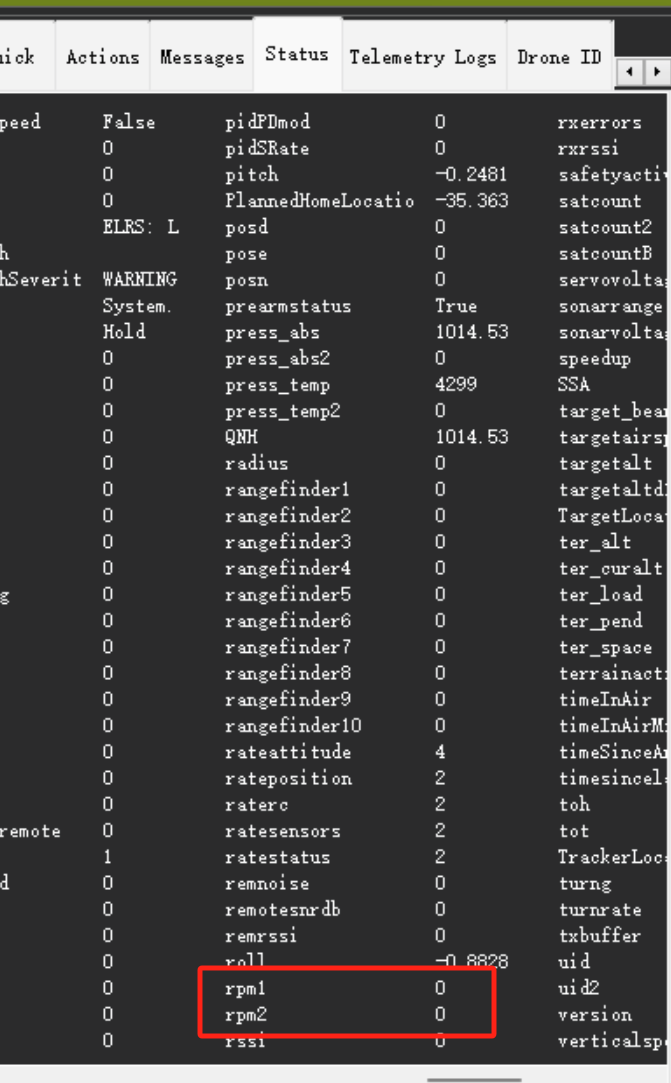
I can’t see rpm value large then 0 in MP, even the motor is spining.
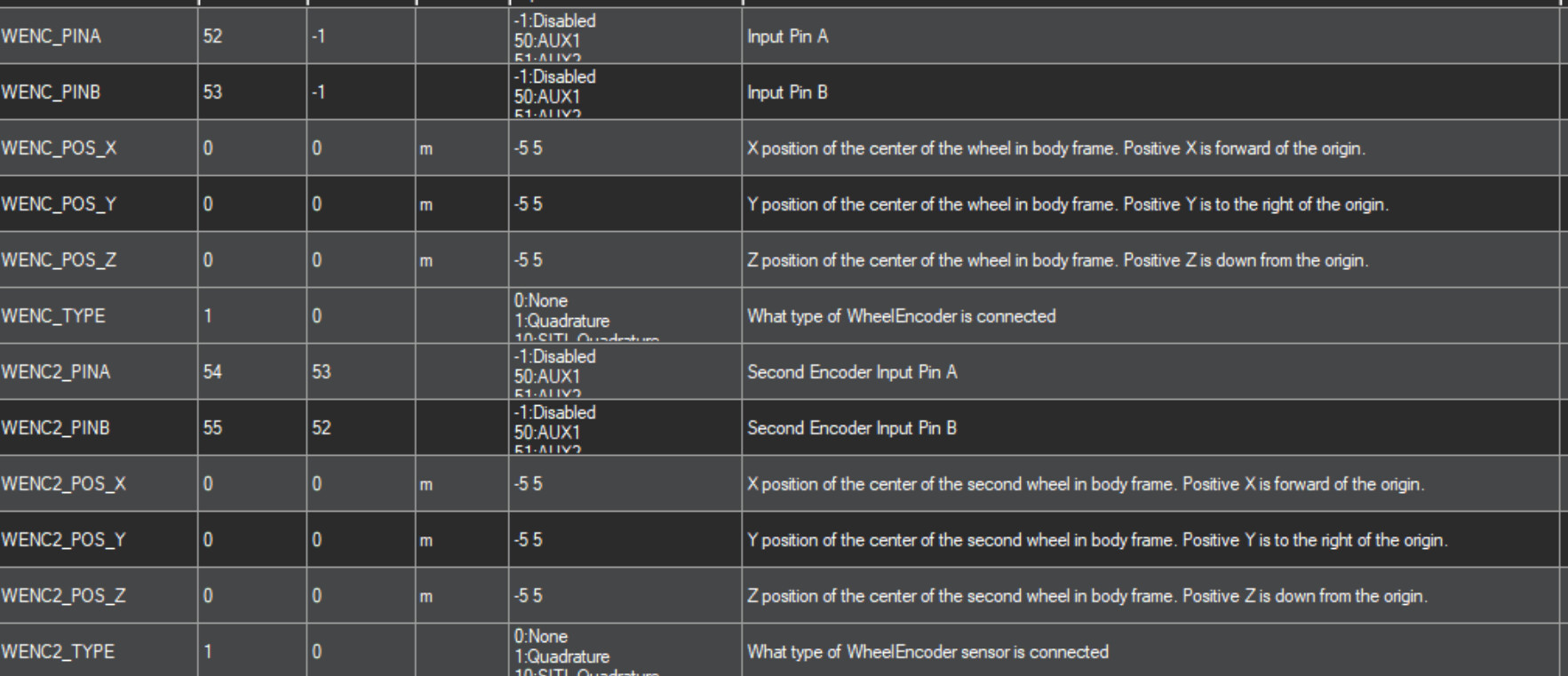
Currently, Servo & ENC settings (H743 PWM3/4/5/6 are numbered 52/53/54/55)
When moto spins, I see following "ISR flood"message.
My encoder 1024 PPR with 1: 60 reduction ratio, so I got 1024 x 60 = 61440 CPR
Anyone can help?
// allow 100k interrupts/second max for GPIO interrupt sources, which is
// 10k per 100ms call to timer_tick()
#if HAVE_GPIO_PINS
const uint16_t quota = 10000U;
for (uint8_t i=0; i<ARRAY_SIZE(_gpio_tab); i++) {
if (_gpio_tab[i].isr_quota != 1) {
// Reset quota for next tick
_gpio_tab[i].isr_quota = quota;
continue;
}
// we ran out of ISR quota for this pin since the last
// check. This is not really an internal error, but we use
// INTERNAL_ERROR() to get the reporting mechanism
if (_gpio_tab[i].isr_disabled_ticks == 0) {
#ifndef HAL_NO_UARTDRIVER
GCS_SEND_TEXT(MAV_SEVERITY_ERROR,"ISR flood on pin %u", _gpio_tab[i].pin_num);
#endif
// Only trigger internal error if armed
if (hal.util->get_soft_armed()) {
show original
24/5/21 6:03:39 : Retrying pin 53 after ISR flood
24/5/21 6:03:39 : Retrying pin 52 after ISR flood
24/5/21 6:03:29 : Throttle disarmed
24/5/21 6:03:25 : Internal Errors 0x2000000
24/5/21 6:03:25 : ISR flood on pin 53
24/5/21 6:03:25 : ISR flood on pin 52
24/5/21 6:03:22 : Throttle armed
24/5/21 6:03:22 : Warning: Arming Checks Disabled
24/5/21 6:03:19 : ELRS: Link rate 150Hz, Telemetry rate 69Hz
24/5/21 6:03:16 : AHRS: EKF3 active
24/5/21 6:03:16 : EKF3 IMU1 tilt alignment complete
24/5/21 6:03:16 : EKF3 IMU0 tilt alignment complete
24/5/21 6:03:15 : EKF3 IMU1 initialised
24/5/21 6:03:15 : EKF3 IMU0 initialised
24/5/21 6:03:15 : ELRS: RSSI now displays normally
24/5/21 6:03:15 : ELRS: Link rate 150Hz, Telemetry rate 149Hz
24/5/21 6:03:13 : RCInput: decoding CRSF(3)
24/5/21 6:03:13 : RCOut: PWM:1-2 PWM:7-13
24/5/21 6:03:13 : Aocoda-RC-H743Dual 0036002A 3031510A 39373436
24/5/21 6:03:13 : ChibiOS: 6a85082c
24/5/21 6:03:13 : ArduRover V4.5.2 (5d9c84ca)
24/5/21 6:03:12 : RCOut: PWM:1-2 PWM:7-13
24/5/21 6:03:12 : AHRS: DCM active
24/5/21 6:03:12 : ArduPilot Ready
24/5/21 6:03:12 : RCOut: Initialising
24/5/21 6:03:12 : Aocoda-RC-H743Dual 0036002A 3031510A 39373436
24/5/21 6:03:12 : ChibiOS: 6a85082c
24/5/21 6:03:12 : ArduRover V4.5.2 (5d9c84ca)
24/5/21 6:03:12 : RCOut: Initialising
24/5/21 6:03:12 : Aocoda-RC-H743Dual 0036002A 3031510A 39373436
24/5/21 6:03:12 : ChibiOS: 6a85082c
24/5/21 6:03:12 : ArduRover V4.5.2 (5d9c84ca)
24/5/21 6:03:11 : Beginning INS calibration. Do not move vehicle
24/5/21 6:03:11 : Barometer 1 calibration complete
Given from the liked code, there’s an upper limit of 100,000 counts per second.
If your encoder produces 61440 CPR, that limits your wheel’s rotation to a maximum of 1.6 revolutions per second.
Does the issue occur at <1.6 revolutions per second?
lida2003
May 22, 2024, 12:12am
3
I can’t control the throttle exactly.
But it feels that way:
BTW, what kind of wheelencorder are you using? is the CPR that high like mine? Any concerns on this flood?
EDIT: I never saw flood warnings on pin 54/55? The most important thing is there is RPM
I’m using: Pololu - 20.4:1 Metal Gearmotor 25Dx65L mm HP 12V with 48 CPR Encoder . 48CPR and 20.4:1 ratio. So WENCn_CPR = 979
61440 CPR is extremely high. Judging by your error messages, likely too high for ArduPilot.
lida2003
May 22, 2024, 2:42am
5
Now I got confirmed info from AKM manufacturer.
My configurations(which I ordered):
max 300RPM
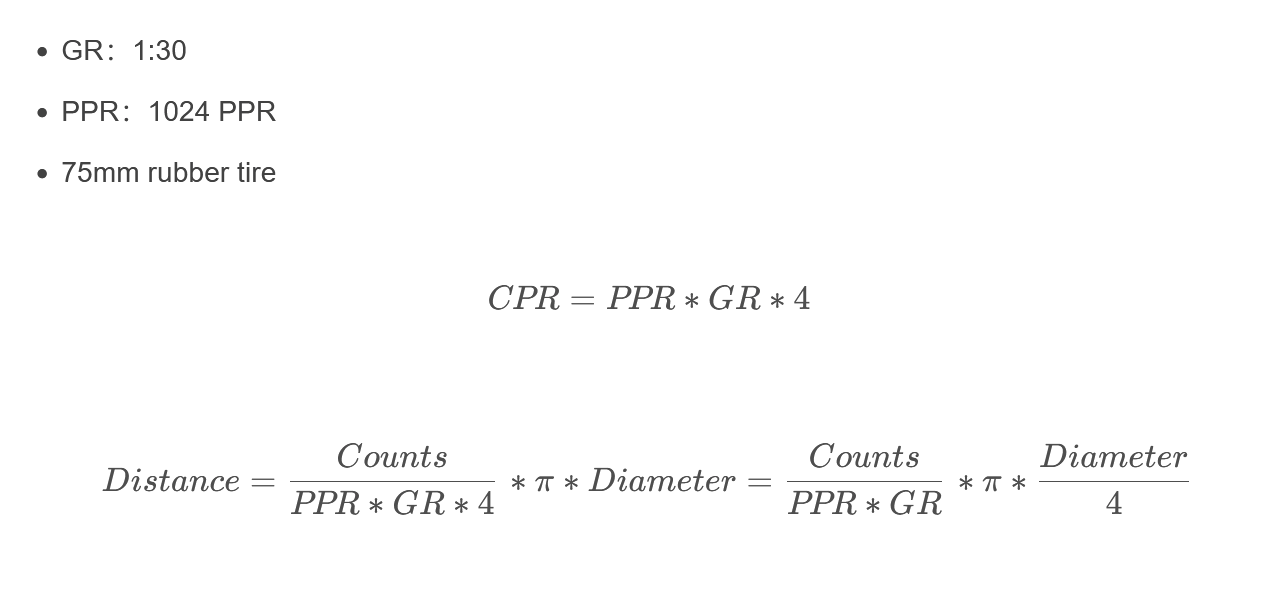
reduction ratio 1:30
quadrature encorder
1024 PPR
75mm rubber tire
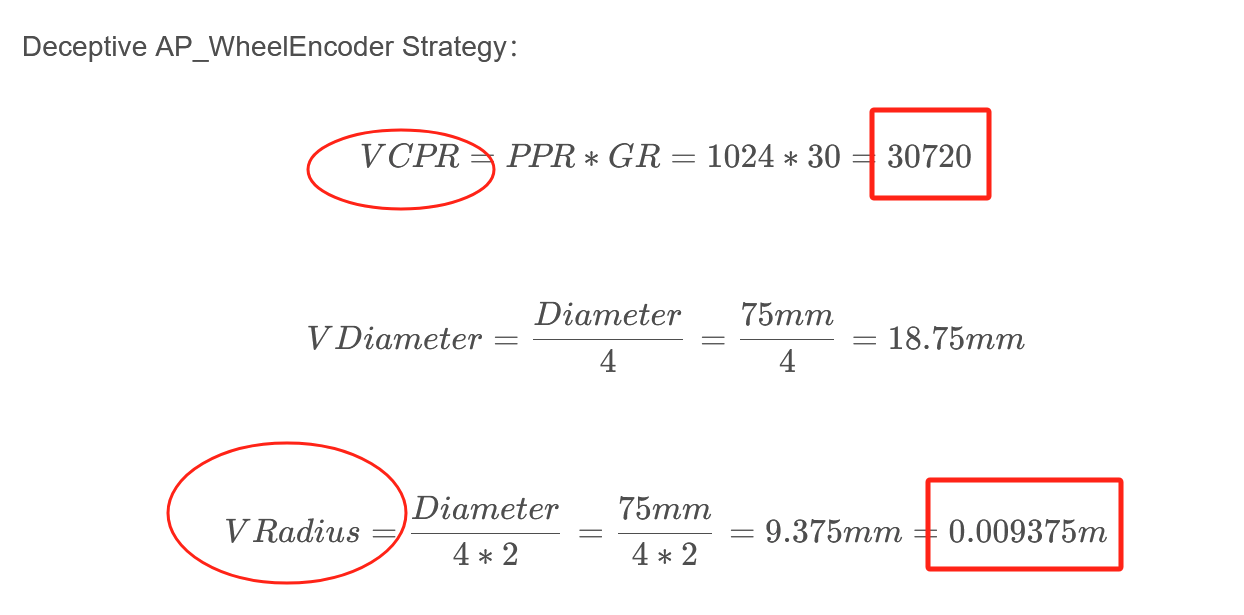
CPR = 1024 x 30 x 4 = 122,880 which is 122,880 pulse wheels rotate once.Note:This formula was told to me by the manufacturer.
Current CPU is low 4%, I just try 60000 quota instead of 10000, then warning is gone (Maybe not full speed), CPU fron 4% to 30%.
But I didn’t see RPM value (Or I have look wrong rpm data?). Is there anything I should take care of?
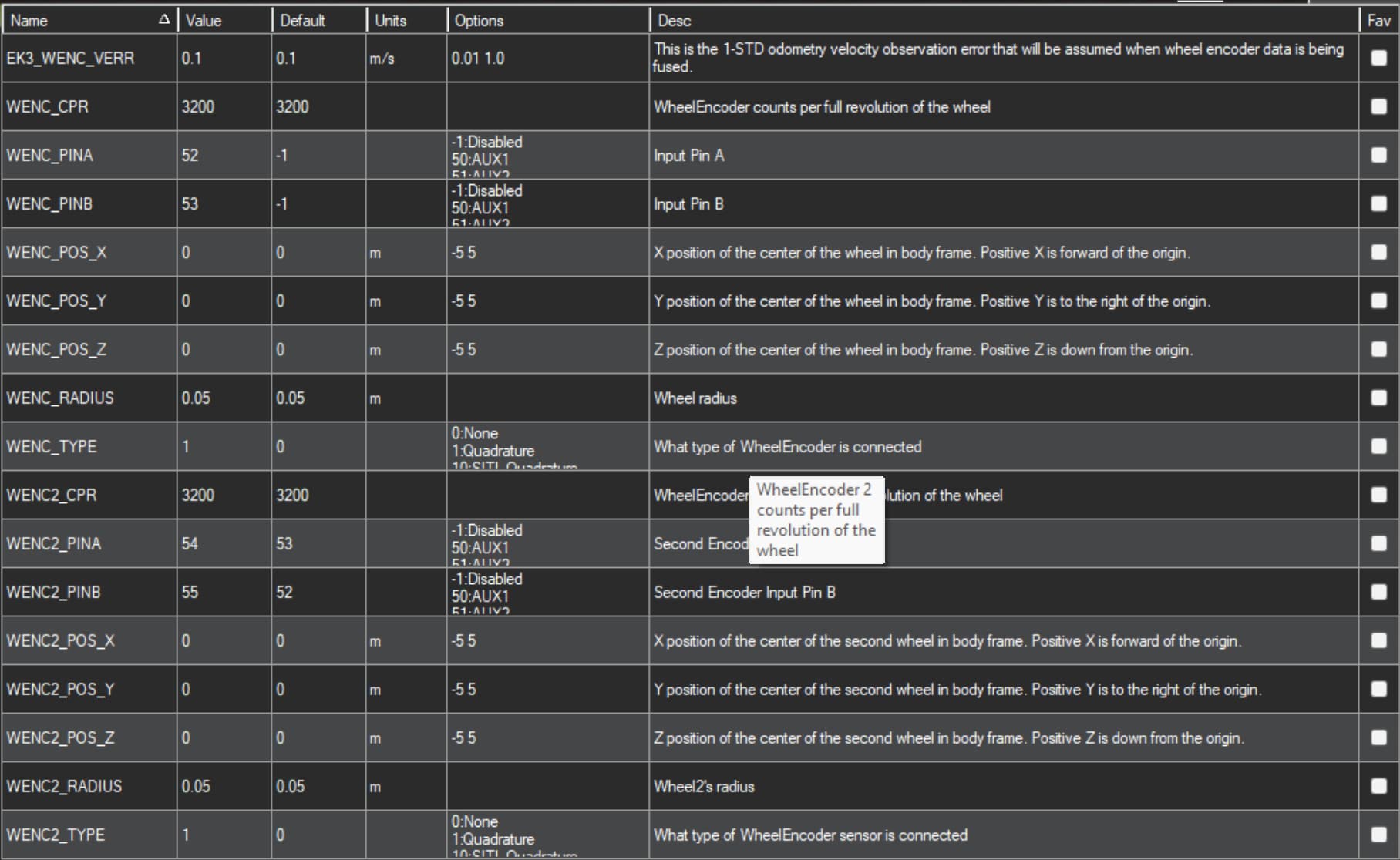
That’s the correct place. Post all your WENC* params
lida2003
May 22, 2024, 3:39am
7
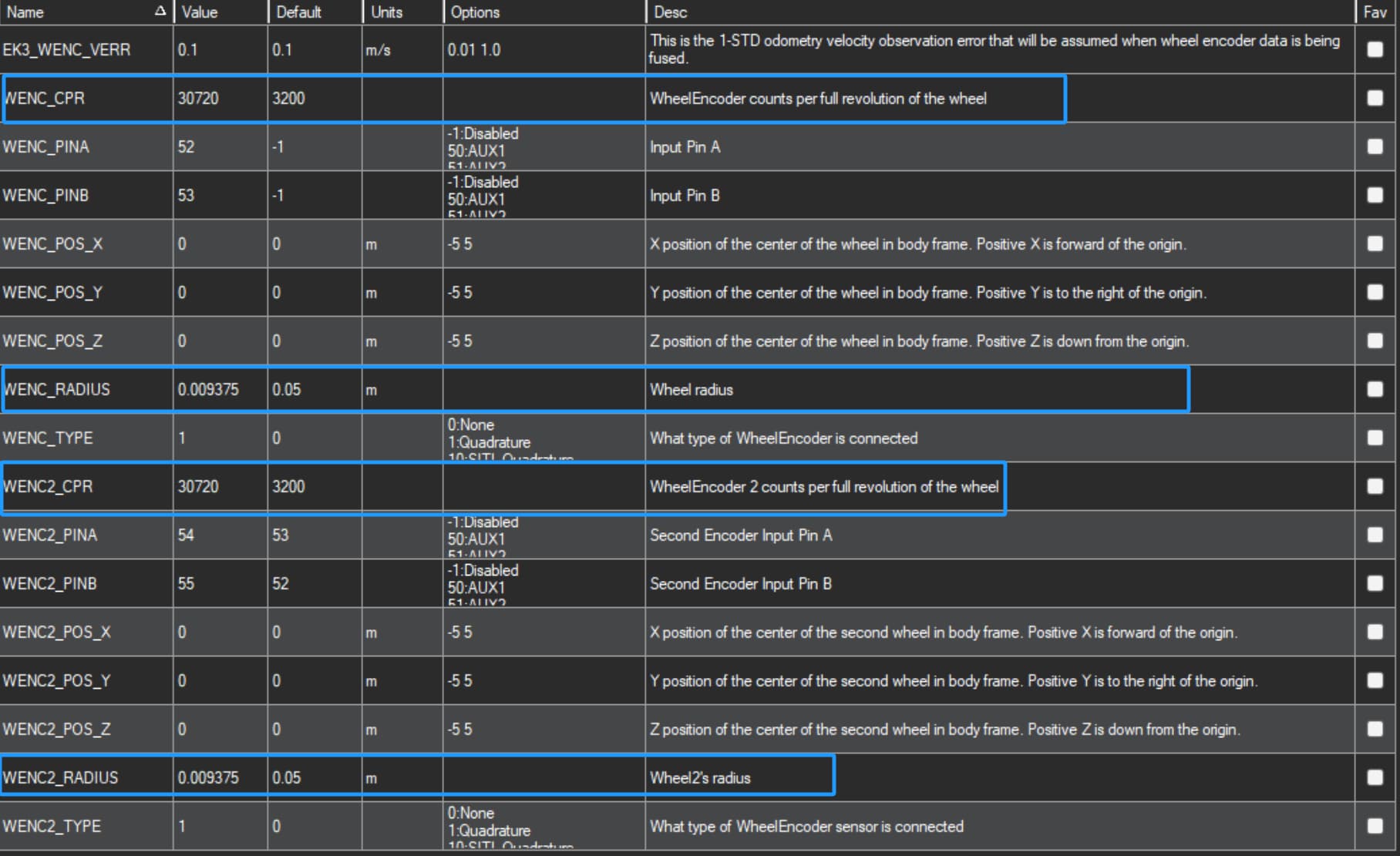
I have set WENC_CPR 1024/3200/ etc.
Step 1: set WENC_CPR/ WENC2_CPR
The above configuration did affect rpm1/rmp2, always 0. (Running my custom build quota 60000, instead of 10000)
EDIT:
WENC*_CPR can’t be set to 122880, it will overflow. maximum is 32767. And I still got rpm1/rpm2 zero.
Sorry - wrong information here. It’s not shown in the status window. You’ll need to go CTRL+F → MAVLink Inspector and look for the WHEEL_DISTANCE messages.
lida2003
May 22, 2024, 7:15am
9
Only the first value of distance changes (and time). Is that OK?
EDIT: It seems not accurate. Is there any calibration can adjust the CPR issue?
But CPR is an INT16, can’t be set more than 32,768.
How about below settings?
Give it a go and see if it gives you realistic numbers
1 Like
lida2003
May 23, 2024, 7:12am
11
(Tape measure)3500mm v.s. (Readings from QGC MAVLink Inspector)3654.79
Well, not that accurate, but it’s close, anyway it’s rubber tier.
@stephendade As there are two encoders, I didn’t see two lines of distance. Is there any way to find out?
lida2003:
(Tape measure)3500mm v.s. (Readings from QGC MAVLink Inspector)3654.79
Well, not that accurate, but it close, anyway it’s rubber tier.
You can experiment with slight changes to the wheel radius (WENCn_RADIUS) to get a better accuracy. For my rover, I increased the radius from 6cm to 6.1cm and got better results. As you say, the wheel radius can vary a bit depending on manufacturing tolerances and compression from the vehicle’s weight.
I think the param for your 2nd encoder are not quite right. Try WENC2_PINA = 57 and WENC2_PINB = 56
lida2003
May 23, 2024, 1:17pm
13
Yes, you are right. You’re so meticulous, which prompts me to update the wiki as soon as possible. Thank you!
ArduPilot:master ← SnapDragonfly:26812_Aocoda-RC-H743Dual-motor-labele-issue
opened 12:28PM - 23 May 24 UTC
[26812 Aocoda-RC H743Dual motor 5-8 mis-labeled issue](https://github.com/ArduPi… lot/ardupilot_wiki/issues/5759)
ArduPilot:master ← Aocoda-RC:fix_h743dual_motor_issue
opened 01:08AM - 16 Apr 24 UTC
[ Fix Aocoda-RC H743Dual motor 5-8 mis-labeled issue #9948 ](https://github.com/… iNavFlight/inav/pull/9948)
Hmmm… New progress, new problem! :)
In order to handle 1024 wire motor encoder, i increased quota from 10000 to 60000.
diff --git a/libraries/AP_HAL_ChibiOS/GPIO.cpp b/libraries/AP_HAL_ChibiOS/GPIO.cpp
index f62bd73c27..55c7dd7c55 100644
--- a/libraries/AP_HAL_ChibiOS/GPIO.cpp
+++ b/libraries/AP_HAL_ChibiOS/GPIO.cpp
@@ -601,7 +601,7 @@ void GPIO::timer_tick()
// allow 100k interrupts/second max for GPIO interrupt sources, which is
// 10k per 100ms call to timer_tick()
#if HAVE_GPIO_PINS
- const uint16_t quota = 1000…