Oh, by new year!!! That’s quick.
I’ll be sure to keep an eye on the betas so I can test it when it comes out. Is there anywhere I can see when this makes it into beta?
Thanks!
Oh, by new year!!! That’s quick.
I’ll be sure to keep an eye on the betas so I can test it when it comes out. Is there anywhere I can see when this makes it into beta?
Thanks!
I am wary that there may be a more serious underlying issue that is causing a more significant slow down and triggering these issues. I am interested to see a direct comparison between 4.2 and 4.3 using the same aircraft, same settings and enabled features.
It would be good to see a back to back comparison with everything pretty much identical, basically the same flight if possible.
If there is something else going on here I would like to get to the bottom of it.
Not really but it could be helpful if you were willing to do some test flying once it goes into master. I could port it onto 4.3 and give it to you. That would be early in the new year. The only difference it would make to you is your navigation and tune wouldn’t be impacted by the slower loop rates.
That direct 4.2 vs 4.3 comparison is where I could really do with some help!
I read the discussion on GitHub, really interesting although I don’t understand much of the code related.
I could absolutely do a 4.2 to 4.2 comparison I posted two logs from each firmware but the flights where not identical.
Here is a log on 4.2.3 with no issue Log nr 1). Right after I updated to 4.3 and collected a log (log nr 2)
Log 1:
https://drive.google.com/file/d/1dMUbzCyqMZaJROAVHfK-0Ts1VGSisw-6/view?usp=sharing
Log 2:
https://drive.google.com/file/d/14uZRf9g8-GhHSG_-BvS0AFAEev7r67MT/view?usp=sharing
These tests where not conducted in the best way.
I could do two more flights, on each on 4.2.3 and 4.3.0 with a more planned flight path.
What should I include in these logs. I usually always start in alt.hold, do some light maneuvers and than some more aggressive once. Than more into loiter. Maybe you have something you want included in the flight?
I will also happily help to test the new system once it’s developed enough!
I would suggest:
That would give me a range of loads. If you are comfortable in Stabilize that would also be good to have 30 seconds of that too.
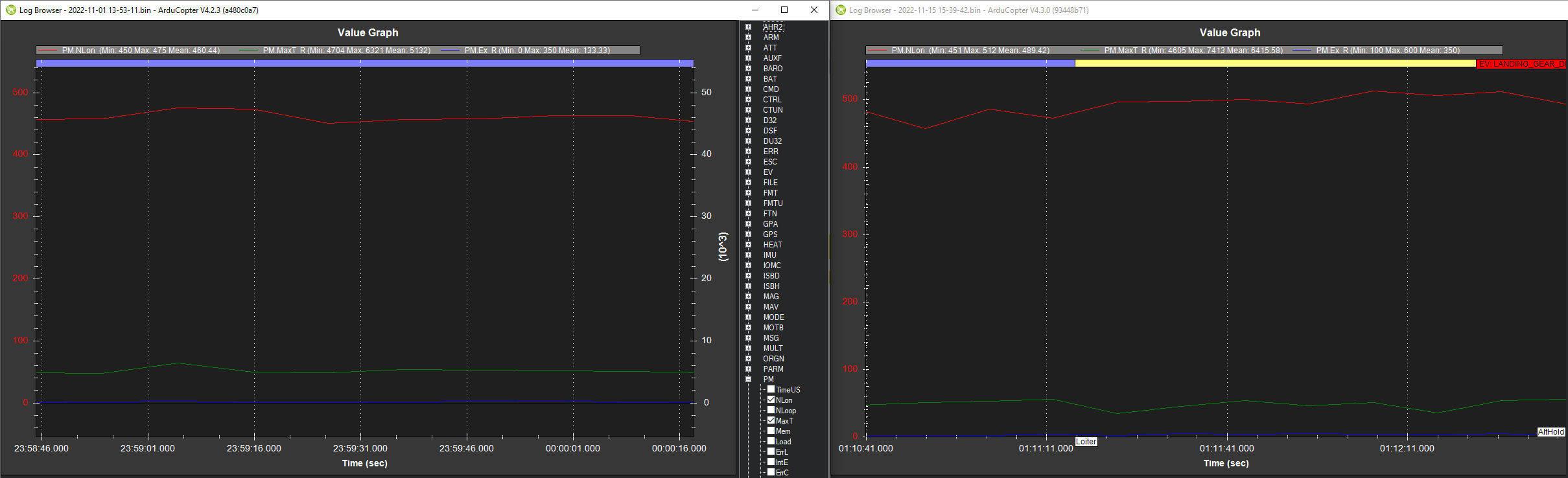
Those two logs you sent me arn’t bad, not perfect as you say but not bad.
Everything has increased:
NLon ~ 103%
MaxT ~ 126%
Ex ~ 237%
I can only compare the Alt Hold section though. A very interesting data point, Thank you!
Just adding some data to make it easer to understand the load:
EK3_IMU_MASK,7
INS_ENABLE_MASK,127
INS_FAST_SAMPLE,5
INS_GYRO_RATE,0
INS_LOG_BAT_MASK,1
INS_HNTCH_ENABLE,1
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,3
INS_HNTCH_OPTS,0
INS_HNTC2_ENABLE,0
INS_USE,1
INS_USE2,1
INS_USE3,1
SCHED_LOOP_RATE,400
Ok, so I might be able to provide you with logs tomorrow.
My thought is,
Stabilize hover 30 seconds
Light movements of pitch, roll and yaw individually. About two twitches/movements for each axis. First two light that two larger.
Forward flight with braking
Backwards flight with braking (back to takeoff point)
Forwards flight with wide 180 degree turn, than a sharper 180 when I get back to the takeoff point.
Alt hold hover 30 sec
Repeat all maneuvers
Loiter 30 sec
Repeat all maneuvers
RTL from 100 meters
That should give you a set of maneuvers and tests to look at.
When you have implemented the new controller I can do the same exact test to compare all three
That would be perfect!!
My INS_FAST_SAMPLE is set to 0 and my INS_LOG_BAT_MASK is also set to zero,
Should I change those settings on my craft. I think the batch sampler/log bat mask causes issues regarding this issue. There was someone else who posted here about changing that which solved the issue I think. Maybe it’s using a lot of processing power
That is what I would recommend for less powerful autopilots. Lets keep it running reasonably. There may be some value in loading things up and redoing the tests but for now I would like to get some baseline data.
Ok, I’ll set the settings you provided and conduct the tests.
It’s almost 1 am here so I’ll have to get some sleep before I can test. But I’ll try and get the tests done tomorrow!
Thanks @Axel1 !
I am not sure what settings you are talking about here. I would suggest you do the back to back test with the parameters that are safely working in 4.3. To test what is causing the high load I would test 4.3 back to back with different things enabled.
These. The bat mask is at 1, I have it at 0 now. And the fast sample at 5, I have it at 0 now to. Did you get these values from the logs I gave you?
Because I have now disabled the batch sampler and that cealred my internal error. I also dissabled fast sampler as a test to. So the parameters you listed are not the once I fly on now. I should have been more clear on that, the logs I posted was a bit old.
I do think I need to enable the batch sampler so that I get the internal error for the test on 4.3.0 right?
Yes, those were the values in those logs to make it easy to see what the key parameters were for those numbers I gave.
I don’t need the error to show up. What we are looking at here is the increase in load on the cube black to get a better understanding of the underlying problem. So keep your parameters set to the safe values for the 4.2 to 4.3 comparison. I don’t see any point at this stage of exposing you to any additional risk.
Ah okay,
The fast sampling, is that for the actual control loop or juat for logging?
I won’t get an error with the fast sampling on so I can have that on if it gives better resolution in the logs.
The batch sampler kind of “causes” the issue. Or tipps it over the line so that one needs to be off.
Fast sampling increases the load due to filtering I believe but I have not broken down the impact of each parameter yet. I would use what ever you intend to run on 4.3.
Do fast sampling have any effect on my flight perfoarmance. If processor load is ignored.
Do the controlers get better resolution?
I believe the filters are running at full rate resulting in less low freuqency noise due to the higher aliasing frequency. So any performance improvements are small.
Ok,
Such a small benefit isn’t worth it here. This is just a test aircraft. Better to save processor capacity.
I’ll post my test logs here tomorrow hopefully!
Sadly enough it has been raining here all day so tests have to wait.
Hopefully tomorrow I will bebable to do the testflights
looking forward to your update
Do you have the latest test results?