Would this mean that the Cube black is obsolete now? Maybe not for hobby crafts but for commercial once?
The only extra feature I have is the notch filter running on esc rpm data. Not for all motors but only one harmonic notch running of motor 1 frequency.
There was some updates to the notch filter so maybe got better but a bit to much for my F3
Would I be able to see this issue if I look at the processor usage from the log file?
This aircraft is already quite old and the cube has been really reliable hardware wise. So for the time being i think I’m goong to stick to it.
My new commercial craft has a cube orange. And when I decide to upgrade this rig I will probably spend tje extra money for a new cube for this one too.
For now I guess I’ll try to lighten the processor load and waot for the “fix” to get released
I wouldn’t say it is obsolete, you just have to manage the amount of processing power and memory you have. So running all three EKF and a bunch of harmonic notches is going to push things a bit too hard. Back off to two EKF and have a look at the PM message and see if you are still getting a lot of long loops and seeing this problem.
I haven’t gotten an opportunity to test fly with the third imu disabled, it’s been snowing here and quite high winds. I’m going to try and test fly tomorrow and also test with 4.3.1 and 4.4.0 if the imu disabling doesn’t work.
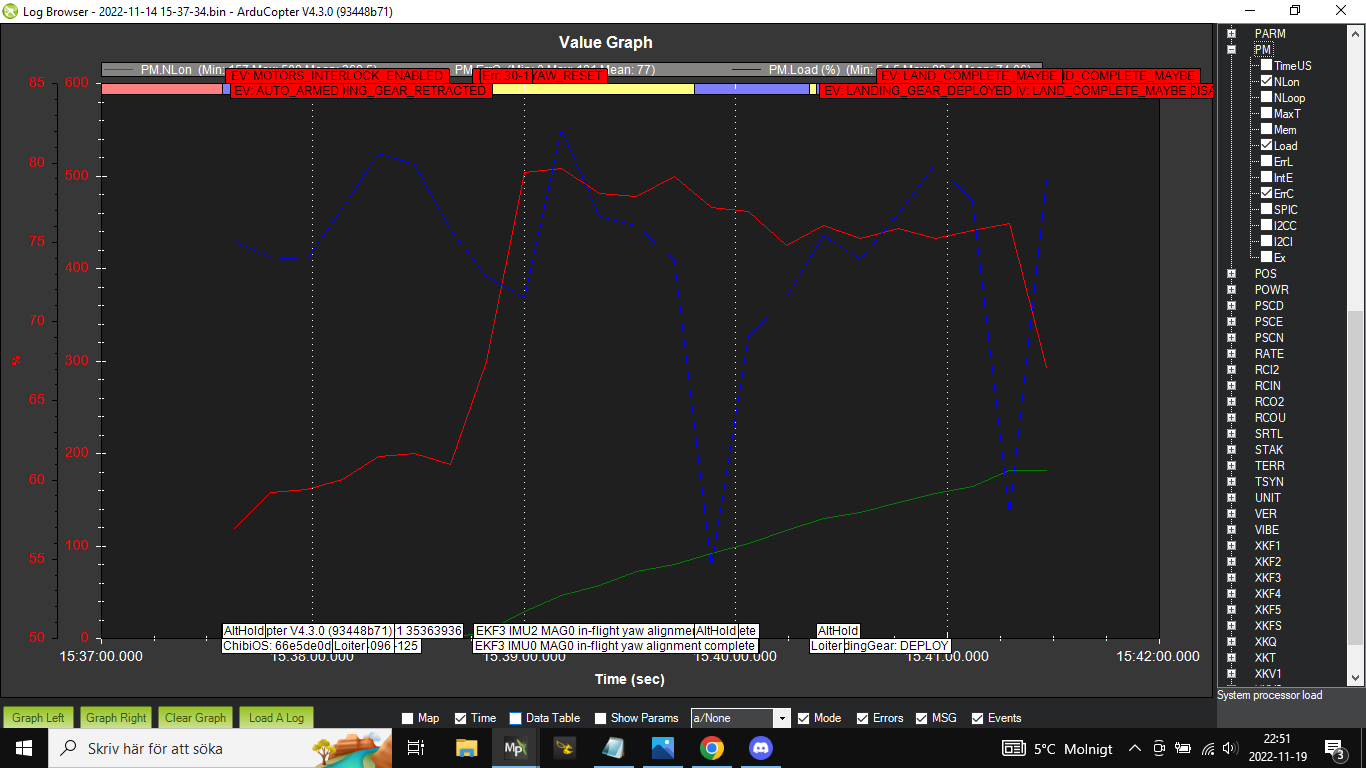
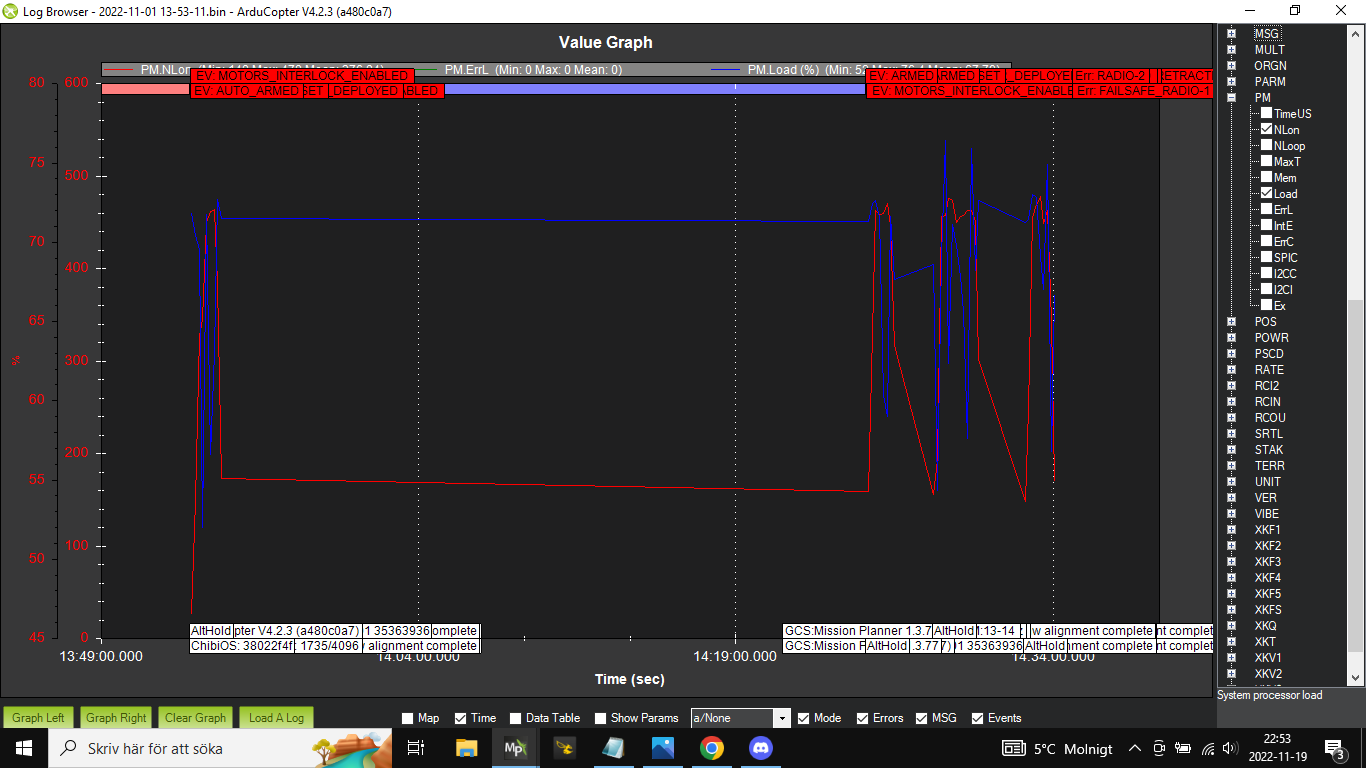
I’ve looked at the logs from a pre error flight on 4.2.3 and a flight with internal error on 4.3.0 and I can’t find that much of a difference in the long loop max time and peak number. Not much difference in CPU load neither.
I thought it’s better to send the logs rather than trying to plot the values in pictures, I’ll probably manage to make that pretty messy.
Why would this error occur now? There is a higher number of long loops but not higher that it peaked before the issue. The processor load is also a bit higher, but not hitting like 90%. It goes up to 85 but that should work, right?
It’s probably obvious why there is an issue and my lack in log analysis and system knowledge won’t help me. Maybe, if you got the time, you could take a quick look at the PM plots in the log and see if there is an apparent reason to why my processor can’t handle the load.
Thanks!
@rmackay9 Also, if you want a pre error and during error log to compare between 4.2.3 and 4.3.0 you can use these. Just in case it would help!
I’m setting ins_use3 to 0 as well. You wrote that eirlier but I seem to have done something wrong when I set it.
Edit: after a reboot, the ins use resets to 1 again
The other two changed after reboot. Maybe I need to change the ekf one before I change the ins one?