Also the spreadsheet is updated, and hopefully soon the Initial Parameters in MissionPlanner will be updated too.
The only important change is a parameter name-change, no changes to formulas to calculations.
2 Likes
Just for checking purposes, I entered my prop size and cell count into the spreadsheet and compared against what has been initially set using Mission Planner’s Initial Parameters Plugin. For all values I got the same numbers, with the exception of ATC_ANG_YAW_P. After using the plugin via Mission Planner, I currently have 4.5 for my parameter. Using the calculator, I get 2.5:
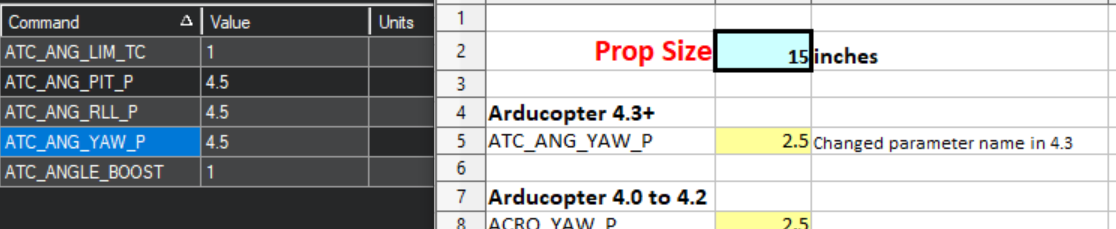
When I try to replace “4.5” with the value “2.5” I get a warning that
"ATC_ANG_YAW_P value is out of range. Do you want to continue?"So I left it at 4.5.
Great spreadsheet.
the initial parameters do not take into consideration the number of blades. Do you think it affects the initial flying experience? for example, 3 blades 11x4.5 and 2 blades 11x4.5.
There won’t be a big difference and tuning will sort it out.
The Accel values are not super-critical, the thrust expo can be adjusted later if it gives you trouble.
As an example for a QuadX8 (octaquad) with 2 motors on each arm, you still just put in the individual prop size in inches. You don’t try to halve or double it just because there’s 2 props in coax configuration on each arm.
If you need to adjust MOT_THST_EXPO
- set too high you can see instability at low throttle
- set too low you can see instability at high throttle
The MissionPlanner warning about ATC_ANG_YAW_P out of range is just a warning, you should set the calculated value.
1 Like
MOT_THST_HOVER will probably be more affected by weight (or weight changes) rather than slight variations in MOT_THST_EXPO. If you do have to change MOT_THST_EXPO a lot I would examine attitude control in logs and probably rerun Autotune.
Ensure you have MOT_BAT_VOLT_MAX and MOT_BAT_VOLT_MIN set correctly.
Is this a hard rule or a recommendation?
MOT_BAT_VOLT_MIN: 3.3v x No. Cells what if my failsafe voltage set it as 3.2v x No. Cells?
You could alter it, but setting your failsafe to 3.2v per cell is risky and the battery may have a short life and there may not be the capacity remaining to complete any failsafe action.
Is it Lipo or LIon?
Unless you’ve got some special battery I wouldnt deviate from the standard values.
If you think you will get some significant extra flight time by lowering the failsafe and MOT_BAT_MIN - I think that would be a mistake.
Like running you car fuel tank to empty before you look for somewhere to fill up - you probably wont make it.
EDIT
If you do have a non-standard battery, then definitely set you values as required.
The spreadsheet and Inititial Parameters in MissionPlaner are just to give a good chance of getting off the ground without having to figure out what to change yourself.
1 Like
If we are using different sizes of propellers (such as at a tricopter), what is the proper way to use the Initial Parameters Calculator or/and the spreadsheet?
Probably just average the size of the props if they are not too dissimilar.
You can always adjust MOT_THST_EXPO later
- set too high you can see instability at low throttle
- set too low you can see instability at high throttle
The filter frequencies are not so critical until you get into very small props.
In a lot of cases you can stick with nice easy numbers for INS_GYRO_FILTER / _FLT values like
20/10 , 30/15 or 40/20 and so on.
So put in your smallest prop size, make note of the values
Put in your largest prop size, note the values
Choose INS_GYRO_FILTER rounded to nearest 10, half that for FLT values.
1 Like
which params changed names? so i can adapt for both
1 Like
I dont think this relates to the Initial Paremeter calculator.
Start your own thread for that issue.
The accel and gyro settings you picture there are not useful, some are calculated during mandatory calibrations, and some are adjusted at each power-up - nothing to do with props “going crazy”
Actually it looks like I’m slightly wrong…
ACRO_YAW_P
did change to
ATC_ANG_YAW_P
but it wasn’t between copter 4.2 and 4.3, but earlier around copter 4.1 to 4.2
I dont enough different log versions to tell the exact version number change-over and the complete parameter list is contradictory in this regard.
The function of the parameter remains the same, just the name changed to put it in the same groups of similar parameters.
The color of your mission planner UI is really cool! May I ask which option you modified?
The MissionPlanner Initial Parameters calculator is updated to improve
- the
MOT_THST_EXPOcalculation, particularly for bigger props - and to include
INS_ACCEL_FILTER,10
Do the MissionPlanner beta updates to get in on the action!
If interested, the old thrust expo formula was:
0.1405 x LN(prop_size) + 0.3254
and the new formula is:
0.15686 x LN(prop_size) + 0.23693
This will keep most very large props to expo values under or near 0.8, smaller props will also be slightly reduced in expo value but this is still well within reasonableness and all the flight data and logs I’ve been collecting for some time.
2 Likes
There is no need to change the Ardupilot Methodic configurator software. It has been using the new formulas since day 1 ![]()
MOT_THST_HOVER used to be 0.25 default (or lower than the expected hover throttle), sometime recently it defaulted to 0.35.
What are the considerations and implications of the change? so, going forward, when users learn the thrust say 0.32, is it considered good, sufficient propulsion?
What difference does it make what the default is? You correct it on the 1st test flight. You look at the commanded outputs at hover to determine the proper thrust/weight range to be in. MOT_THST_HOVER is influenced by Expo.
1 Like
I am not sure about other users, I used it as one of the benchmarks to determine the right propulsion system. For example, flight performance between different propeller pitch angles and between a 2-blade and a 3-blade propeller. So, if the result is between 0.25 to 0.35, how should the users analyze the performance? keeping the rest unchanged.