Just had a maiden flight with a new OCTA-QUAD build 850mm.
8 X 380kv motors
8 X 16x5.5 foldable props
8 X Kotleta20 ESC
2 X Li-Ion 12800 mah DIY
2Mauch 50am sensors
AUW 5650 gr
Flight seemed to go well (though it was very windy), just cruised the area in alt. between 1 meter to 8m.
So, I am Looking at the logs and I can’t seem to find any ESC telemetry information except a new section called CESC, but it doesn’t provide each motor telemetry.
I also had a problem with motors not disarming after the LAND_COMPLETE message which is a bit weird.
The RCOU message will show what is sent to the ESCs but this is different from the feedback from the ESCs.
The issue with the motors not disarming sounds like a bug and we’ve seen similar issues (now fixed) with ToshibaCAN ESCs. I suspect the issue is that the UAVCAN ESC driver expects the output range to the ESCs will be in the range of 1000 to 2000 but that’s not enforced. You should be able to test this by setting MOT_PWM_MIN = 1000, MOT_PWM_MAX = 2000.
I wonder if maybe you could try using MP’s motor test feature to reproduce the issue and test the fix?
If I had to buy it again, I wouldn’t touch it.
Reasons:
soldering power pads are so small (about 7mmx3mm) and you need to solder 16awg wires to it, I spent hours to get it right every time a small amount of solder run to one of the sides (had to use small head) and had to do “short test” for each soldered joint.
The more serious in my belief, is it has no mounting points. Your only option is shrink wrap (provided) and double sided tape for mounting. It is bulky, and it has no straight side so I truly got a very messy build which I hate, I needed to install 8 of these ESCs.
The only up side is its price, but honestly, after this experience I don’t think I would use it again.
HTH,
Gal
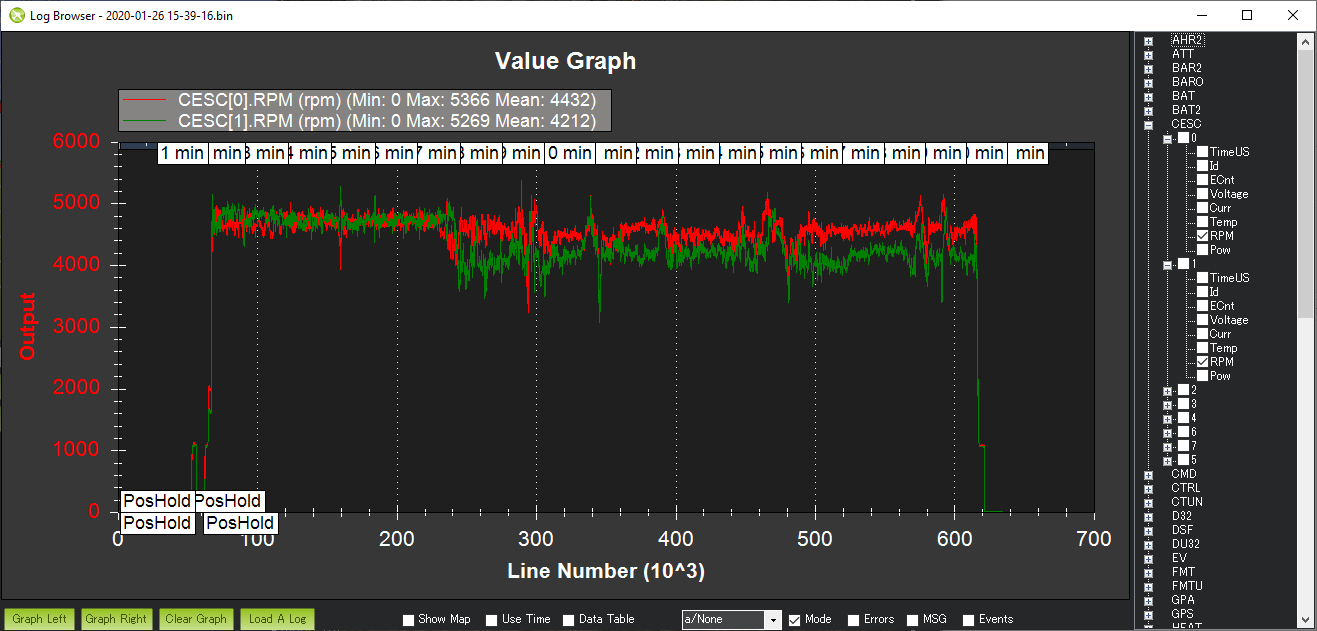
Hi @rmackay9 , thanks for your answer. In my logs I don’t get the CESC parameters separated like it’s on your image.
On my MP (1.3.70 build 1.3.7277.34800) there is only one entry like so:
I shall set the values to 1000-2000 and I have no problem removing the props for motor test, however, how do I try to reproduce this on the WB? I mean, what’s in motor test other than running the motors either one by one, all or in sequence?
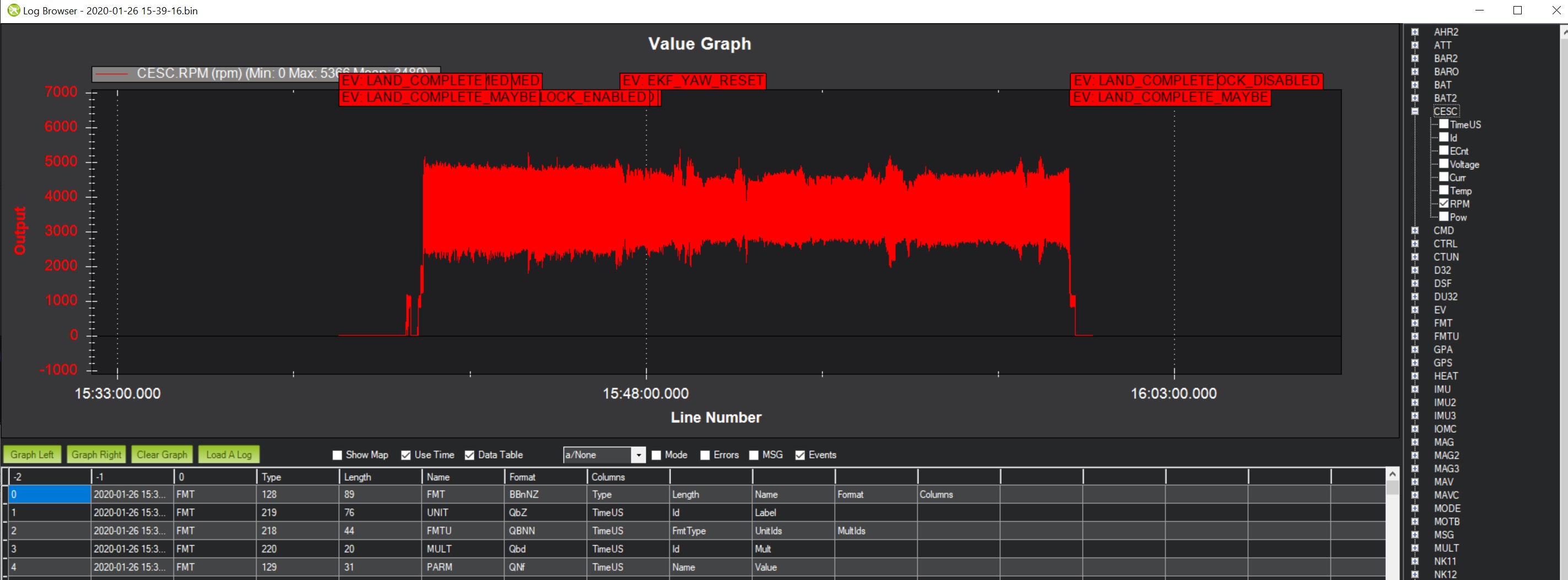
Ok, this is a display issue with the version of MP on your PC I think. The latest beta MP knows that the “Id” field means there are multiple ESCs reporting using the same basic message. Maybe try updating MP using the Help screen?
We have a similar Setup, I tested it with the latest Mission Planner Software. It works fine, shows all 8 motors with the telemetry data.
Before we used the betacopter 3.6.7, when we wanted to have the ESC Telemetry. Only difference is, that the betacopter version did have live telemetry of the ESC.
Hi, I’m using ArduPlane V4.1.0 and cant find CESC in my logs. Ive tried looking at them with both apm planner 2.0 and latest mission planner. Also what is keeping me from seeing the vesc info “live” on GS?
@Launchpad-McQ I had to install MP beta to view cesc messages as individual esc.
On apm planner you don’t have this functionality as far as I know.
To make sure you do have cesc messages (if everything is configured correctly) you can simply open the log file with a text editor and search for cesc.
HTH
Gal