Très bien! But I think Parameters is not explicit enough, can I suggest someone from ardupilot to modify this parameter name? Or maybe to split it in other more understandable options? Like Range Finder, Optical flow, etc. because you know, in 2 months I will have forgotten this
Maxbotix definitively not reliable for outside. Try original and copy, both are unable to report alt values above 2 meters for outside. And then, when I tried a mission in terrain mode, with range finder activated (in my case: RNGFND_TYPE = 2), if the drone goes above 2 or 3 meters, it continues to climb (even above geo fence limit) and even RTL doesn’t work, it happens 3 times and I had to land in stabilize mode. For me it’s a bug, after RNGFND_MAX_CM is reached, the drone altitude should be managed by the barometer, but this is not the case and causes a Fly away if you do not take the hand again.
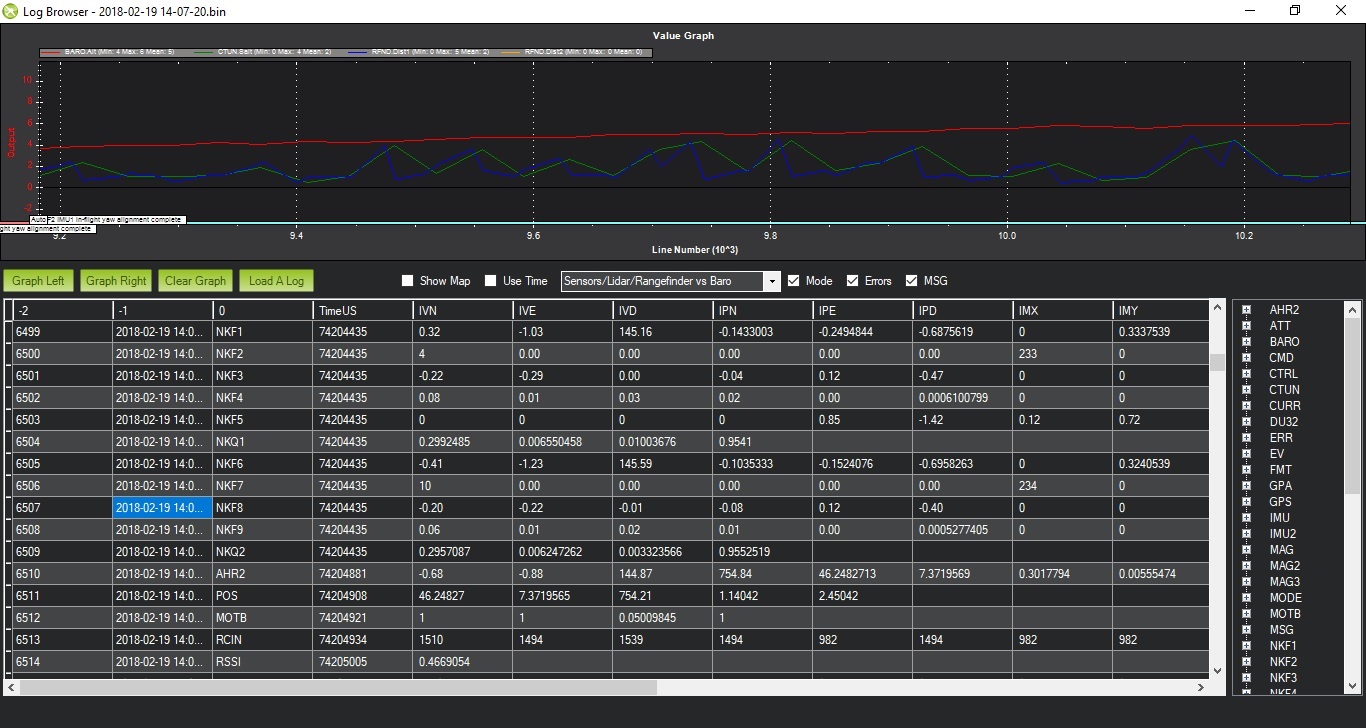
I had this problem only in Terrain mode mission, the range finder seems to work better (in coorelation with baro) in Relative alt mode. Stranger Things…
Hi @cookmangr, you said, long time ago, you got sonar range values with HC-SR-04 I2C module. I have the same one and I can’t. Can you help me, please?
Thanks!


 But I think Parameters is not explicit enough, can I suggest someone from ardupilot to modify this parameter name? Or maybe to split it in other more understandable options? Like Range Finder, Optical flow, etc. because you know, in 2 months I will have forgotten this
But I think Parameters is not explicit enough, can I suggest someone from ardupilot to modify this parameter name? Or maybe to split it in other more understandable options? Like Range Finder, Optical flow, etc. because you know, in 2 months I will have forgotten this