How could I be so inattentive?
This discussion of the problem:
http://discuss.ardupilot.org/t/surge-in-altitude-upon-1st-entering-althold-or-poshold/14200
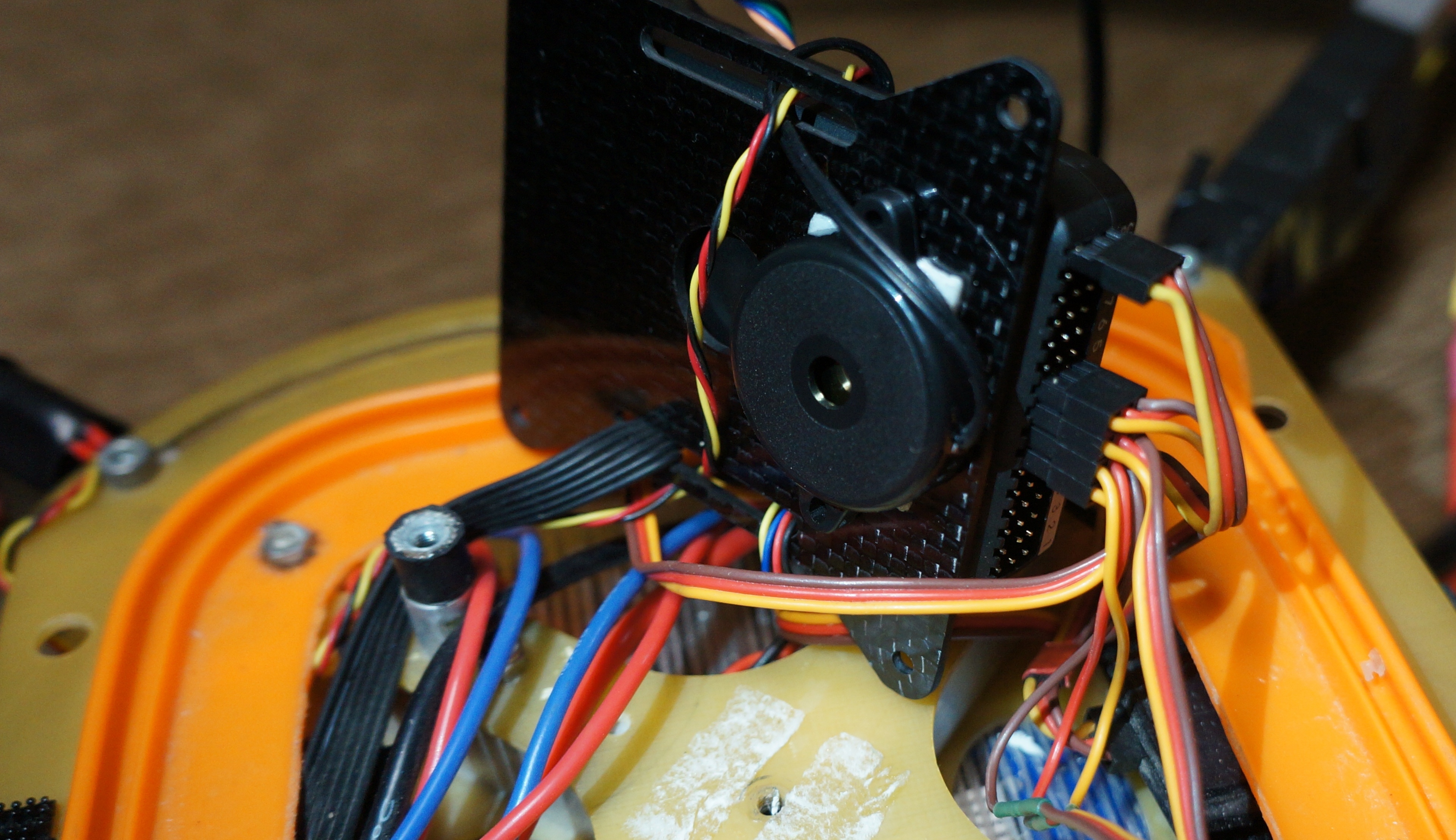
CAUSE BUZZER!!!
I disabled the buzzer, and stopped jumping
How could I be so inattentive?
This discussion of the problem:
http://discuss.ardupilot.org/t/surge-in-altitude-upon-1st-entering-althold-or-poshold/14200
CAUSE BUZZER!!!
I disabled the buzzer, and stopped jumping