Also reduce D terms to these:
ATC_RAT_PIT_D,0.00275
ATC_RAT_RLL_D,0.00275
Also reduce D terms to these:
ATC_RAT_PIT_D,0.00275
ATC_RAT_RLL_D,0.00275
There is also the system identification flight mode and the off line model based PID tunning that can be done in Matlab Simulink.
But to do that you need a bit of control theory.
Hi Sir,
Can you give me more information?
Thanks for your reply!!!
and
Hi,
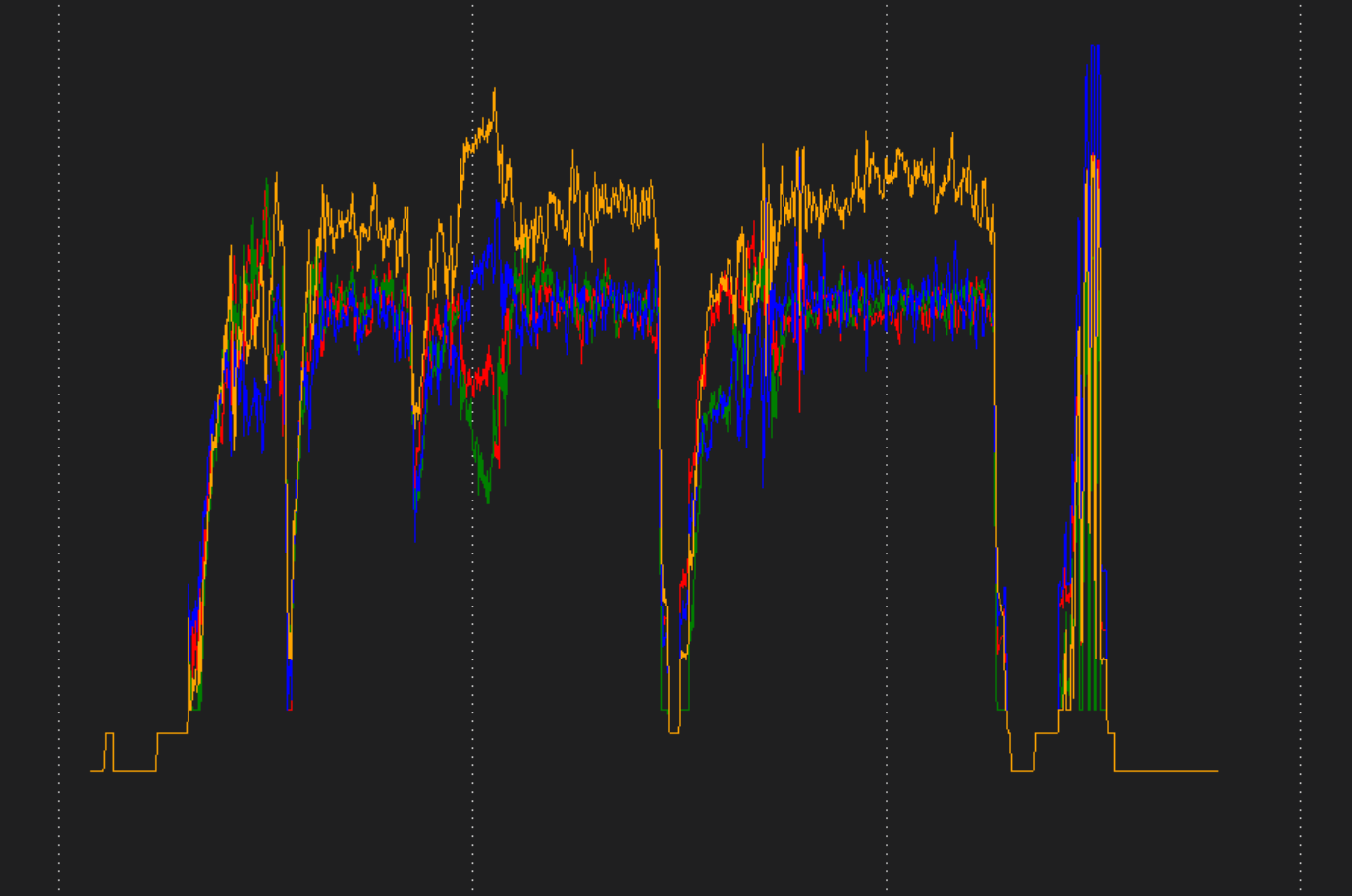
This is the new log file. The quadcopter behaves better, especially in holding position and altitude control (the Shawn’s settings for Baro and GPS made a big difference), but it still had serious oscillations. Also, I think there is a problem with Motor 3. The aircraft was always heading towards this motor. Maybe, this also causes the oscillations. In fact, the motor was getting pretty hot and it had a strange noise (this noise had appeared when the harmonic notch filters were activated for the first time) and wouldn’t rotate several times, when I was arming the aircraft. All the motors Sunnysky V4006 are new, as well as the ESCs.
There’s definitely something wrong with that motor then. It could be a physical issue like the shaft at the bottom of the motor is jammed against the motor mount, or a mounting screw is too long and touching a motor winding. Check the ESC and wires are not shorting to each other or the frame, but that usually gives a more drastic effect.
Hi,
My motor No3 has a serious problem. I thought that the bearings were the problem, but I replaced them and the motor still has the weird noise and it was getting too hot. Also, at high RPM the motor is not stable and oscillates. I will order a new motor and then I will continue with settings.