Yes,
The gyro itself having gyro-x, gyro-y, gyro-z axis.
And the graph is having x and y axis.
Out of these which one should be considered that is my confusion.
I am about to complete the dynamic natch configuration.
What is the minimum freq? from the graph below please.
INS_HNTCH_REF = hover_thrust * SQUAREROOT( min_freq / hover_freq )
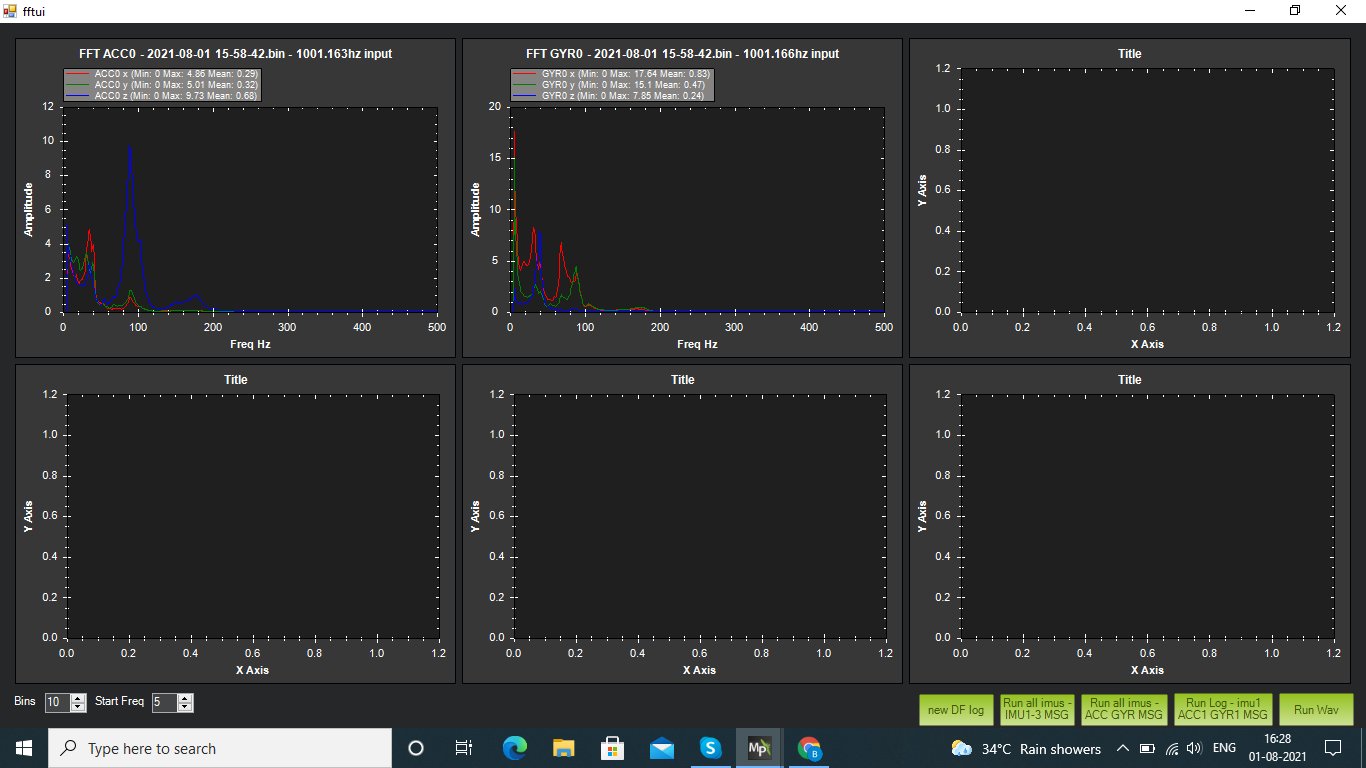
The graphs are “fast fourier transforms” of the data generated by gyro-x, gyro-y, gyro-z. Fast fourier transformation takes a wave (like gyro-x) and outputs a graph of how many of that frequencies it sees. It visualizes the natural harmonics/wobble the craft has, and from that the notch filter is set up to apply to data to remove those natural wobbles. I think what happens is (someone correct me if I’m wrong) the incoming gyro data is FFT, the filter is applied to the output, then an inverse FFT is run to build the original wave back minus the wobble removed with the filter.
Gyro-x’s data, FFT, and notch filter are completely separate from gyro-y.
This picture shows what a FFT does
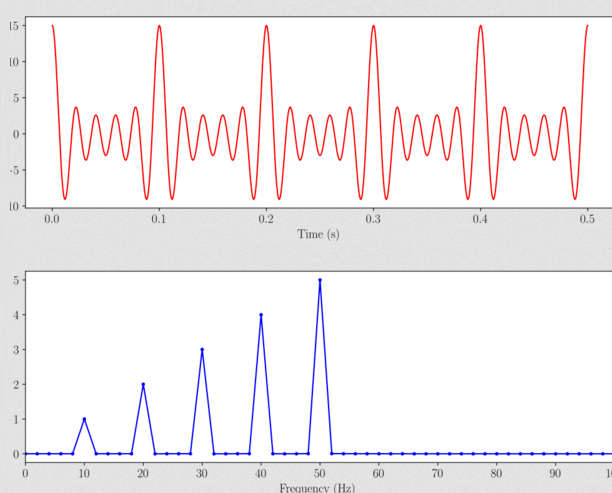
You see FFT every day (well probably discrete cosine transformation, but the idea is the same). For example, JPG images are divided into blocks and each block put through a transformation, then a filter applied and then shifted back to the original data. How blurry the picture is, is dependent on how aggressive the quality% is, if its say 95% then the jpg compression will only remove some of the high freq data, but at 50% compression, its removing a lot more. Same idea with using a filter (basically setting that area of the graph to 0)
1 Like
Forget about that. Just use mot_thst__hover as I said. And if you post an FFT graph for filter analysis purposes you only need the Gyro0 graph. Just snipe that out.
Dave,
I need min_freq value for the equation below to set the Advanced Notch Frequency Scaling Adjustment in Throttle Based Mode.
- I have hover_thrust and hover_freq values.
- Where I can get min_freq value?
INS_HNTCH_REF = hover_thrust * SQUAREROOT( min_freq / hover_freq )
No you don’t. At least at this stage you don’t and perhaps not at all.
Okay. Moving on to auto tune.
Hello,
do you give me confirmation that the value of hover_freq is obtained from the highest value among those circled in red in FFT GYRO ??
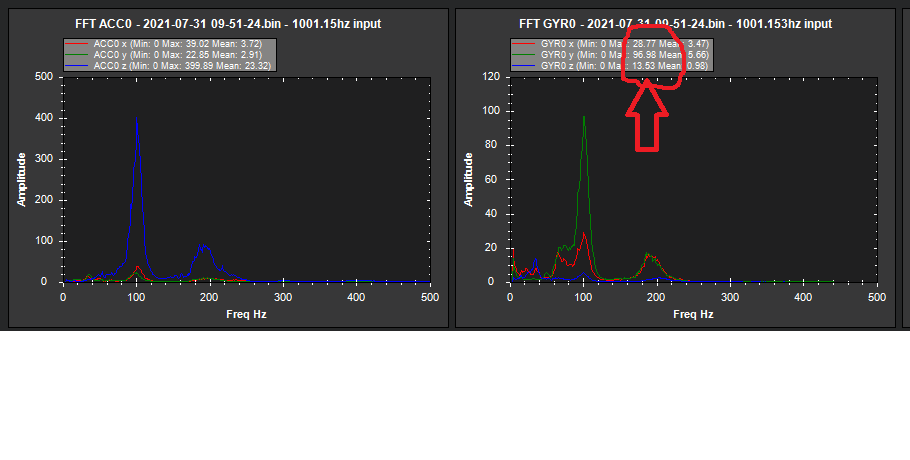
I have taken hover_freq as 100hz and INS_HNTCH_BW as 50 hz.
Not always but in your case yes.
Good.