Yes the value changes according to x-y movements
Hello,
I’m following this thread and it’s being very interesting to read! One question: If GPS is lost during flight, would the FC switch to OpticalFlow automatically and maintain position? I’m thinking about having OpticalFlow as a failsafe to prevent the Copter to fly away when there is no more GPS. Is that a real use case?
Kind regards,
Sam.
Hello
Yes, actually the EKF is blending both signals and will progessively reject a bad Gps and use the opticalflow as the velocity estimator (with IMU as state estimators as well). When Gps gets back to normal the EKF will mix it back.
There is are parameters EK2 and EK3 than set the gps and other state estimators confidence levels
@ppoirier Thanks! That sounds promising!
Hello everyone, I do not know if it is the right thread for this query but since I see that it seems that you have worked with the px4flow you can maybe tell me what I am doing wrong.
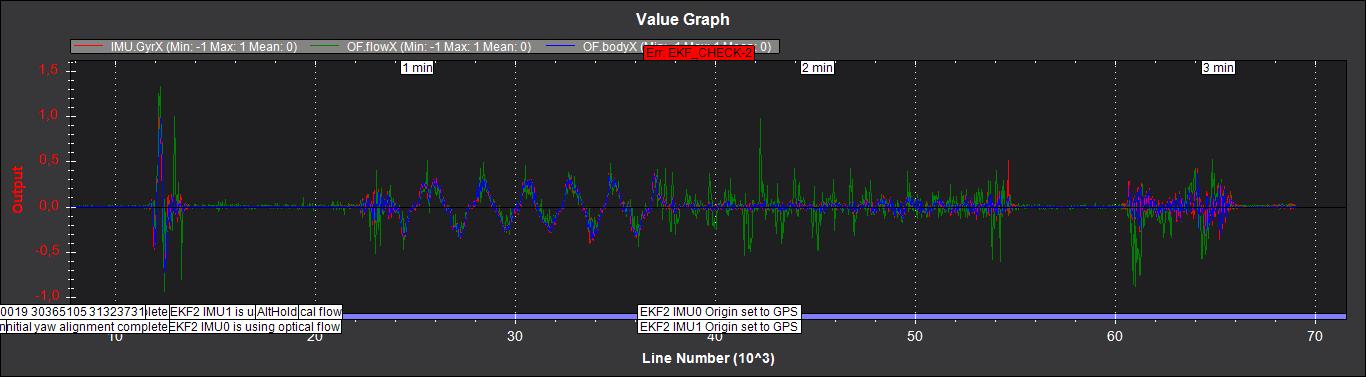
I think I followed the steps of the wiki well but when I do the manual test I get the following graph (the same thing happens with pitch).
Bin archive: https://1drv.ms/u/s!AhvJ_mXkKaypwYUbRNY87zEN5XI6tQ
I also met this issue, opt_m_x, opt_m_y and opt_qua in HUD are updated only once.
1 Like
Im really sorry but suddenly I remembered this information here. These connections doesnt seem to have a sonar included am i missing something ?
Hi @misoragod
Have you solved the problem.I currently using px4flow, and I encountered the same problem(Bad OptFlow Health).I have questions below
-
I must buy another rangefinder which means I cannot use built-in Maxbotix LZ-EZ4 sonar,but I saw the video in your youtube, it seems you don’t use any other rangefinder in the video.How does it works?
-
I am using pixhawk4 mini and the current mission planer version is 1.13.74 APM version is 4.1.0