Now with the dev versión I have problems with another script that worked fine with Rover 4.0.0
– This script switch on/off a relay with the arm/disarm status.
local gripperstatus = 0
function update() – this is the loop swhich periodically
–gcs:send_text(0, “switch relay”) – send the traditional message
servo.set_output_pwm(94, 1500) – set the servo assigned function 94 (servo9_function = 94)
if arming:is_armed() then
if (gripperstatus == 0) then
servo.set_output_pwm(94, 1100) – set the servo assigned function 94 (servo9_function = 94)
gcs:send_text(0, “TRITON desacoplado”) – send the traditional message
gripperstatus = 1
end
–gcs:send_text(0, “relay on”) – send the traditional message
relay:on(0)
end
if not arming:is_armed() then
if (gripperstatus == 1) then
servo.set_output_pwm(94, 1900) – set the servo assigned function 94 (servo9_function = 94)
gcs:send_text(0, “TRITON acoplado”) – send the traditional message
gripperstatus = 0
end
–gcs:send_text(0, “relay off”) – send the traditional message
relay:off(0)
end
return update, 1000 – reschedules the loop
end
return update() – run immediately before starting to reschedule
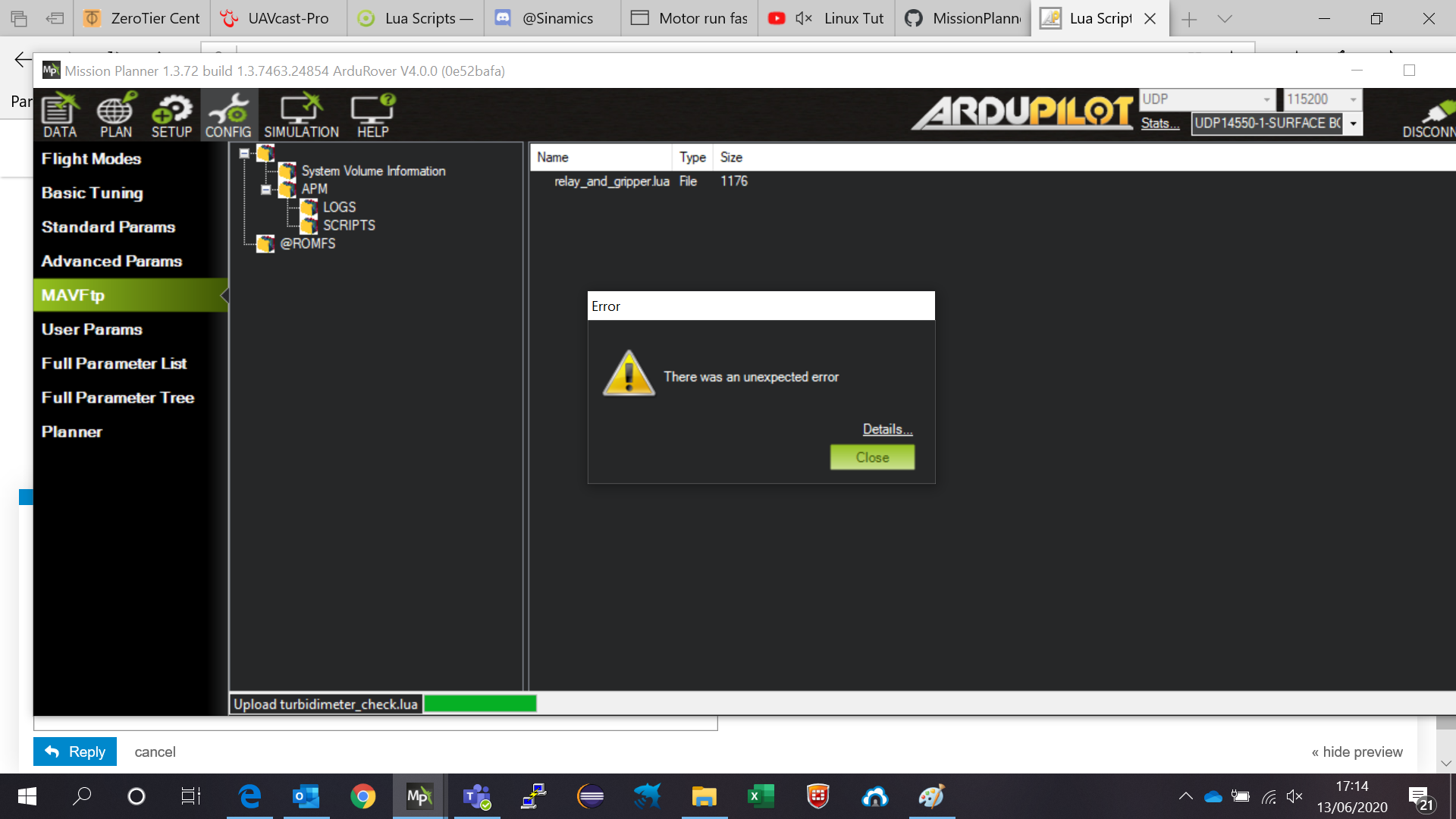
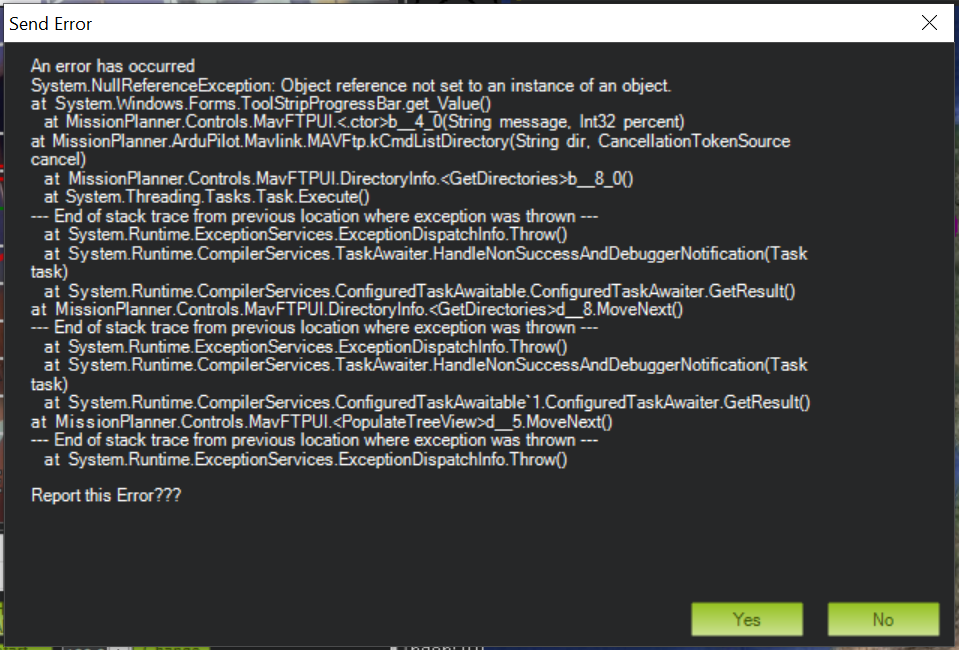
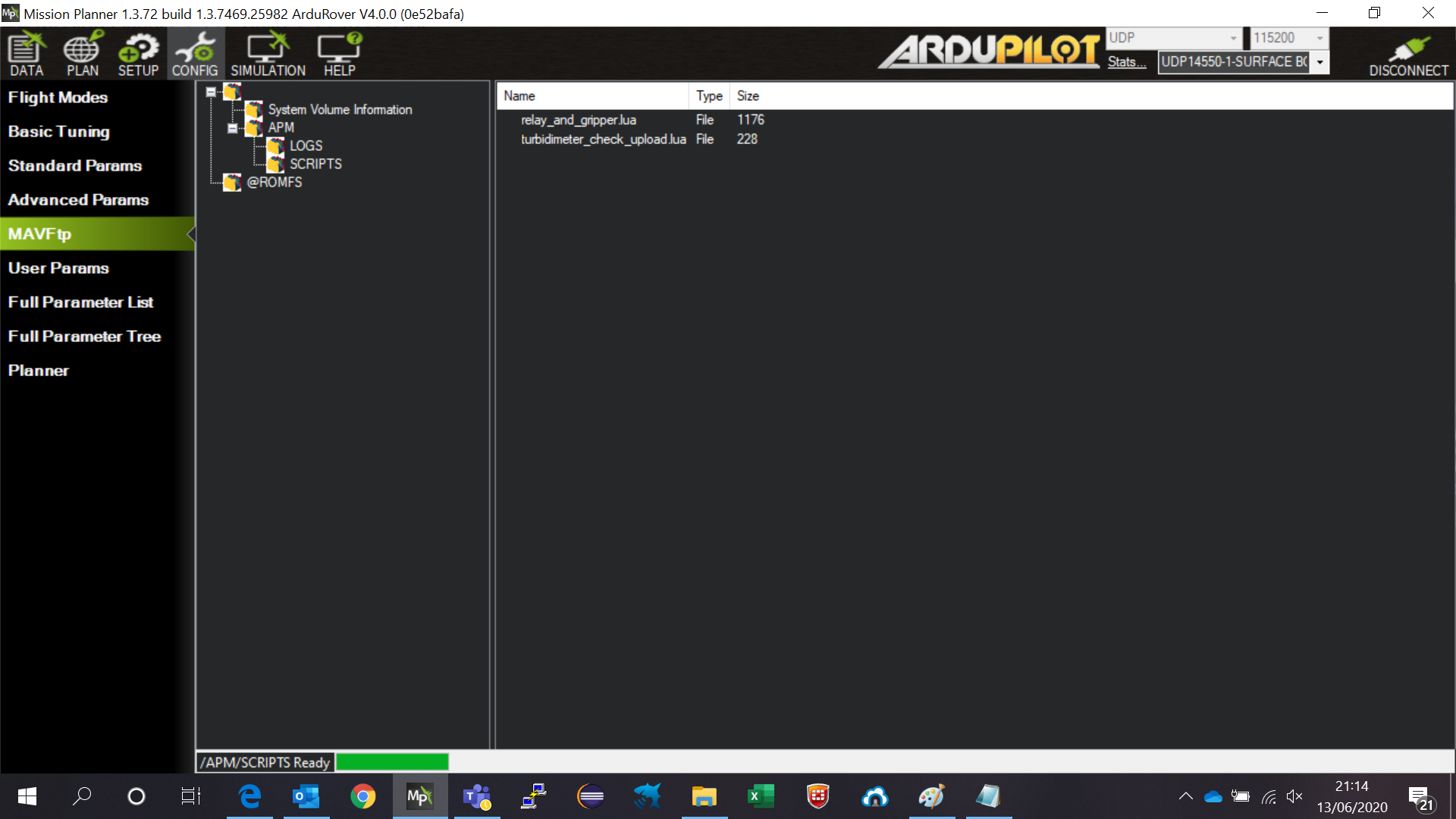
This error message appear since I updated Mission Planner to the last versión to get the MAVftp option (because I can’t see it in the older versión I had installed)
After several trials…
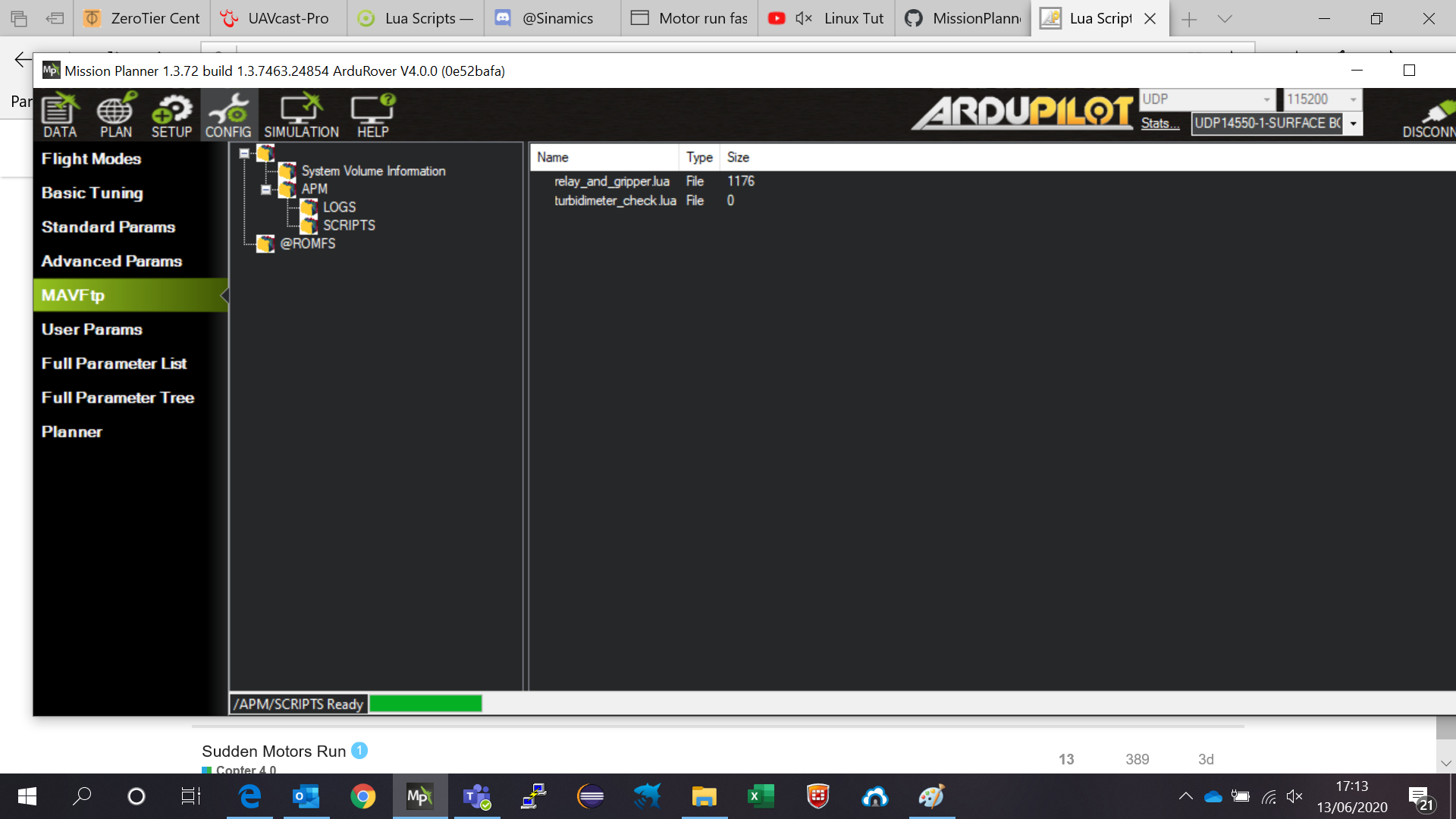
Finally I got upload the script, but only if the size is smaller than 228…I don’t understand why…even changing the SCR_HEAP_SIZE parameter I can get it!
I can upload the script (big size script also) if I connect the pixwhak directly to the PC via USB but I have the problem if I try upload the script via telemetry (RPI + UAVcast)…
So, you can download when mission planner is connected to the USB, but not when over UAVcast to the PI that is connected to the same USB? Sounds like you have a issue with UAVcast.