Hello Patrick
Does this feature still work in guided_no_gps mode?
There is some confusion about the guided_no_gps mode = this mode is ‘‘blind’’ and you control the quad using trust vectors.
I would say I can use the avoidance in alt-hold mode and in guided mode using opticalflow with no gps that is similar to guided GPS in the sense that you can control with EK3 using relative position.
Is there a way to only hold altitude using height measuring lidar connected to the pixhawk(no optical flow) while the pixhawk is in guided_nogps mode? I’m trying to fly the drone using an offboard computer that’s handling odometry, mapping, localization and etc. Do I really have to implement an offboard altitude control algorithm too, because from what I gathered, Mavros can only send thrust setpoint but not a height setpoint (maybe I’m wrong?)
Apologies in advance since this is straying from the original topic of this thread 
Hi @FabricioSilva, If you want to know if you are getting distance values from a sensor in Mission Planner. Have you tried using the Proximity sensor?
It is located in the Flight Data Screen ( press Ctrl + F ) then click on Proximity and it should pop up with a window like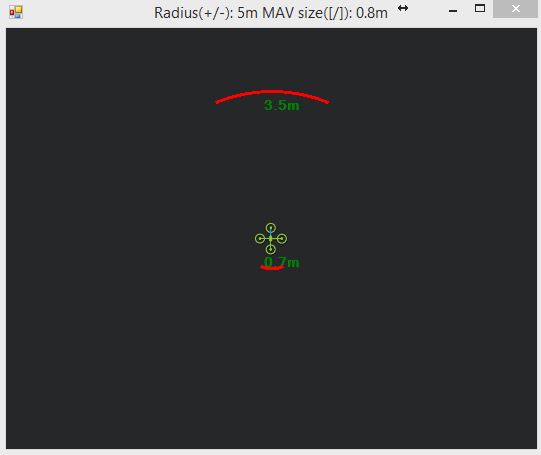 this.
this.
Hello
I have just started working on ArduCopter and is using MavLink connection to communicate messages to Matlab. I am working on obstacle avoidance using fuzzy logic and trying to read OBSTACLE_DISTANCE message (https://mavlink.io/en/messages/common.html#OBSTACLE_DISTANCE). Still now i am unable to receive any information about sensor and obstacles.
Please guide me how to enable distance sensor from Mission Planner and also what can i do to enable my quadcopter detect obstacles during auto mode and flying mission.?
Any guidance and support is appreciated.
What sensors are you using?
Did you ctrl-f on mission planner to enable radar screen?
Hello
Sorry i am beginner in Ardupilot and learning at each step. I am not using any hardware for this setup. Everything is based on Mission Planner settings and Mavlink messages. Is it possible to simulate sensors through misison planner settings? I have looked into the screen came after Ctrl-f . What setting will be required in Mission Planner to enable it to send DISTANCE_SENSOR and OBSTACLE_DISTANCE message out to external setup running in Matlab.
Hi @ppoirier, thank you for your work, it has been a blast learning about arducopter through your replies/code/videos.
I was wondering if the firmware version is important since this post is in the Copter 3.5 section? For example I’m running Arducopter V3.6.1 is it fine?
Also I managed to compile your VL53_MULTI_PROMINI code only by adding mavlink.h and mavlink_msg_distance_sensor.h .

Any version 3.5 and up are OK
Does the object avoidance mode in Arducopter only works when a 360 lidar is connected directly to the FC?