I have been trying to calibrate my Optical Flow sensor. It is a Matek 3901-L0X sensor.
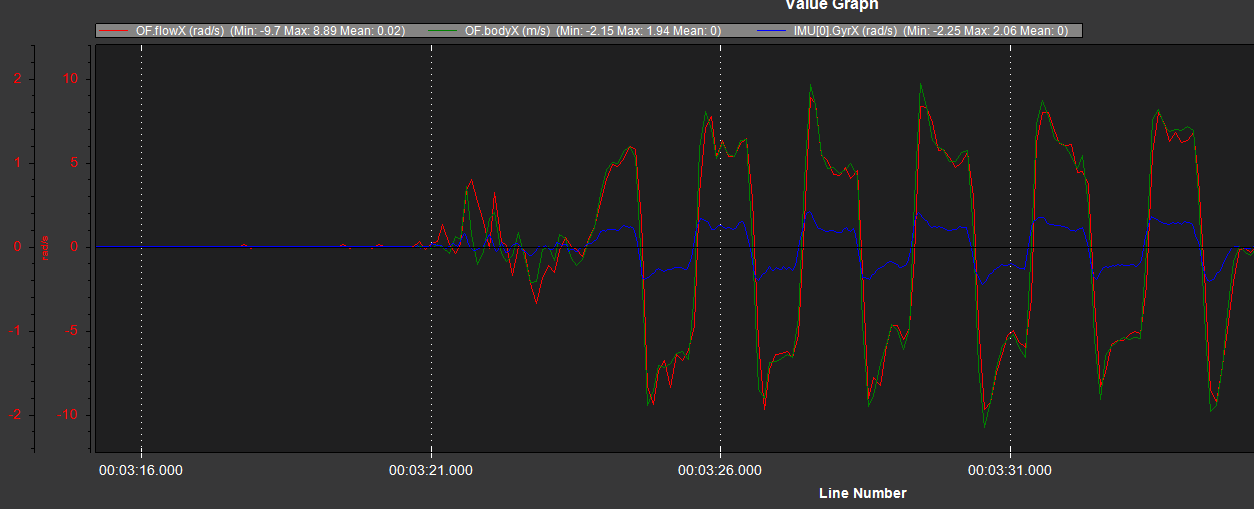
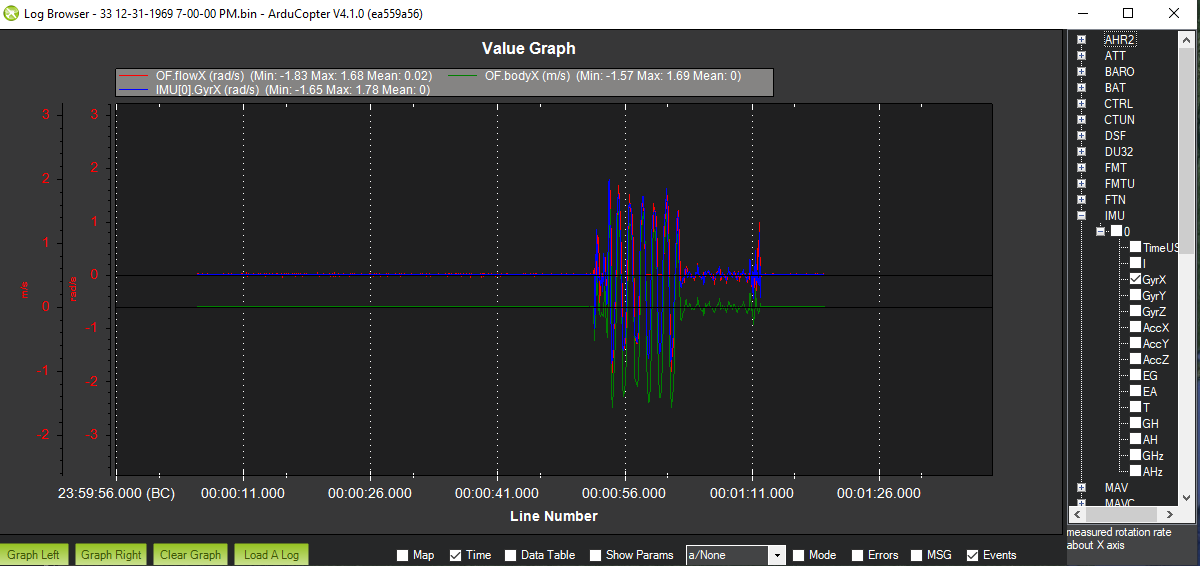
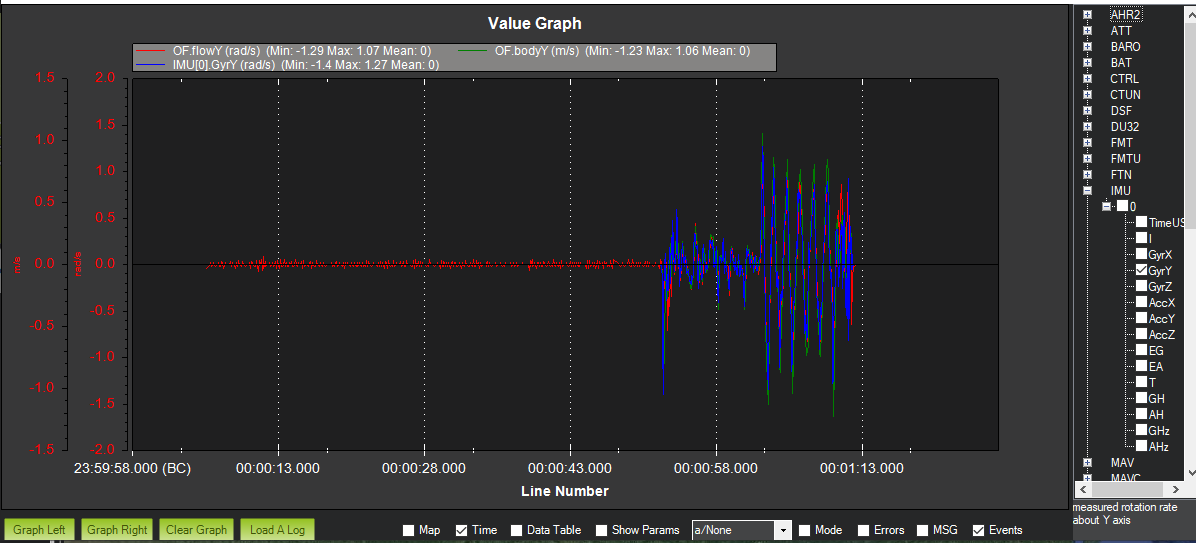
During the calibration process, I noticed that the IMU GyrX data was larger in scale compared to FlowX and BodyX for the sensor. Nothing in Optical Flow Sensor Testing and Setup — Copter documentation is telling me how to fix this issue or that it ever was an issue. Here is a screenshot of what I am seeing:
I think you have to change the FLOW_FYSCALER and FLOW_FXSCALER to -800, I read this in another forum post for the sensor but couldn’t find it again. I’m also using the same sensor and I’m having issues with it giving readings. It only works when I reboot the FC randomly. What firmware version are you using?
Thanks for the reply! Yeah I thought the FX/FY Scaler was used for FlowX larger than BodyX for the sensor but I dont remember, I will try when I get home today.
I can point you to another topic I created about this sensor, hopefully it helps your issue a little:Matek 3901-L0X Setup Help - No Data and Bad OptFlow Health Message - #8 by MaxBuzz
That’s great to hear, I read in your original post that you were using 4.0.3, is this the version you’re still using? I switched to 4.0.7 and the sensor does not display values at all anymore.
I actually ended up upgrading to 4.1.5 as Ardupilot didn’t support the Matek sensor just yet at 4.0.X. I think that was an additional underlying issue that I fixed while getting to the root of the problem. Try it and let me know what happens!
Yea no wonder 4.0.7 and 4.0.3 didn’t work at all. 4.1.5 and 4.1.0 are giving me that issue, but 4.1.0 has a higher chance of working on reboot for me. Are you using the original sensor board or the new revision with the different MCU due to chip shortage?
Maybe try and run a diff between your config params and the config params I attached at the beginning of the forum?? If you have Ubuntu or some Linux app on your computer just run "diff "