I used two GPS for Yaw. My flight control version is 4.0.7. GPS is F9P. The flight mode is Loiter mode. My helicopter is powered by an internal combustion engine. About 130 kg. After damping the flight control, the vibration of the helicopter should not be too great now.
However, after flying normally for more than an hour, the helicopter suddenly reported a GPS Glitch. Then the helicopter landed. When I looked at the logs, I found that the desired height DAlt and the actual height Alt had changed from a few meters (which was true) to over 300 meters (which was completely false). I haven’t found out the cause of the malfunction. Now when I turn the power off and restart the helicopter, the fault is gone. I am very surprised and confused about the cause of this malfunction.
@Flying2015 you should really upgrade your firmware to 4.0.8. You are putting your aircraft at great risk of having an in-flight engine shutdown. See this thread
@jiang I don’t understand what you are asking. Here is the branch that contains the code. The link I provided in the previous post describes how to load the firmware on the board since 4.0 is no longer the stable release of Copter.
just for my understanding. Why should he not update direct to V 4.1.2 ?
Would this not be better? Or is there a problem with a direct update from 4.0.7 to 4.1.2.
@heri i wasn’t sure if there was a reason he was staying with 4.0. But I would agree that upgrading to 4.1.2 would be better especially now that 4.1 has been out for a few months and gone through several point releases.
@bnsgeyer@heri We didn’t update because of vibration problems with our helicopter. Because our vibrations are so great, they trigger some extreme situations. In this extreme case, the 4.0.7 version performed a little better than 4.1.2. So we haven’t updated yet.
But Bill and Leonardthall took care of it for us now. We plan to update it when the new version comes out.
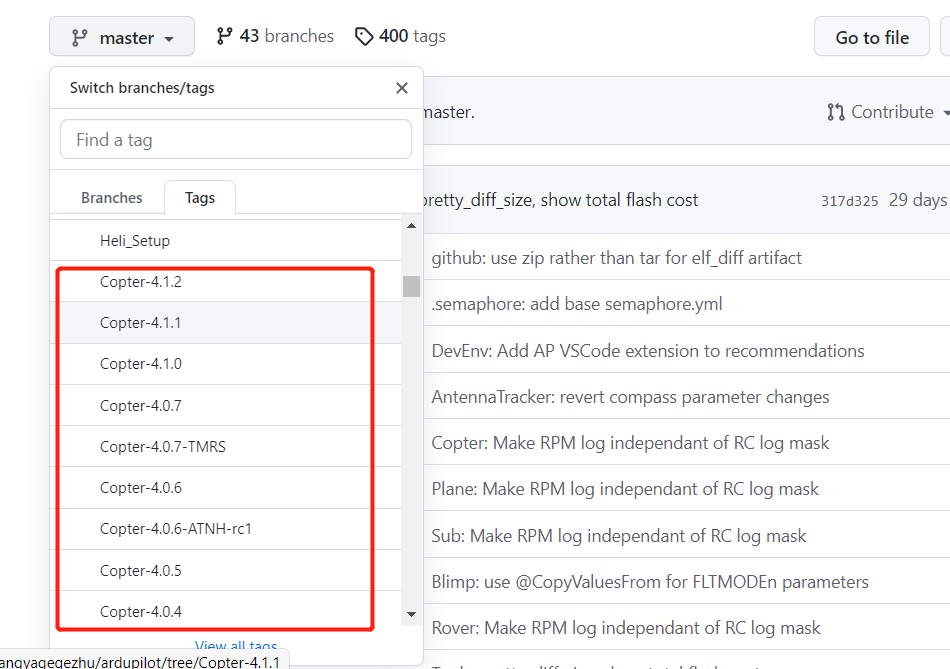
hello @bnsgeyer I downloaded this firmware, but I can only read his code and cannot compile the firmware 。Can you upload a fork of version 4.0.8 that compiles to GitHub?like this
@jiang what you show in the picture is just the tags for specific versions of the source code. To get heli 4.0.8, you should fork the Copter 4.0 branch. The latest commits of that branch are 4.0.8. You will see that last commit as 4.0.8 release notes. If there are any newer commits then just delete them and compile the code for commits up to the 4.0.8 release.
@jiang A branch is source code. Branches are used to break away from the master branch (or even another branch) at a certain point in time to develop the source code without affecting the master branch. Changes to the code are tracked through commits. A tag just marks a point in time on a branch. In ardupilot, once development officially begins on a new major version (4.0, 4.1 …), then a branch is made for that major version. This is so development can continue on the master branch without affecting the new major version. Only select changes from that point on will be pulled over from the master branch to the new major version branch. Therefore when you want to compile an older major version like 4.0. you only have to checkout the branch. So in this case, it is Copter-4.0.