My latest config file.
BuffaloQPconfig2.param (16.0 KB)
My only changes are these flight modes for QuadPlane.
FLTMODE1,17 (QSTABILIZE)
FLTMODE2,18 (QHOVER)
FLTMODE3,5 (FBWA)
FLTMODE4,7 (CRUISE)
FLTMODE5,12 (LOITER)
FLTMODE6,0 (MANUAL)
My latest config file.
BuffaloQPconfig2.param (16.0 KB)
My only changes are these flight modes for QuadPlane.
FLTMODE1,17 (QSTABILIZE)
FLTMODE2,18 (QHOVER)
FLTMODE3,5 (FBWA)
FLTMODE4,7 (CRUISE)
FLTMODE5,12 (LOITER)
FLTMODE6,0 (MANUAL)
Thanks for the file.After watching the video, I’m impressed! As I have all the parts ready to go, I’m going to start the build. I sure wish there was a way to eliminate the possibility of it ever tucking, either aerodynamically or with the FC setup. I could see this as my main platform otherwise. Perhaps some aero engineer will stumble upon this wing and figure it out for us?
Given the successful test, but the possibility of tucking, what is your plan for the quad? Do you feel the cause, and a fix would ever be found? I sure hope so as I was so exciting by the project I purchased 2 79’s!
There are ways to reduce or eliminate the tucking. You should be able to read about it on-line. For me, it requires excessive tinkering. The FC has proven that it cannot handle the tuck (maiden flight) but you could use it to keep the plane at a lower speed with the aid of an air speed sensor. The FX-79 appears to have lots of lift which allows it to fly slow. I am not sure what the stall speed is with the added quad booms.
My immediate plan is to re-test it to gain more confidence. I may also install the landing gear set previously posted over the winter months.
My current focus has been on the Ranger EX, Opterra, and Nimbus 1800. All different designs using APM. The Ranger EX requires no hand toss but a road or mowed field to take-off and land. It can carry multiple cameras. The Opterra requires a hand-toss and needs to land in field. The Nimbus VTOL can take-off and land in a small clearing. It also easily breaks down into small sections. Compared to my FireFLY6, the Nimbus VTOL uses half the motors, half the ESCs, and breaks down more easily. The FX-79 doesn’t break down as much but it does have a nice square shape with the quad booms attached which eases the storage.
The second (and 3rd not videoed) test of the Fx-79 Buffalo QuadPlane was also successful. I kept the throttle to 50% or less after the initial transition from QSTABILIZE to FBWA. The video shows a double transition about mid flight. I have good control in both hover and forward flight modes.
We flew four APM planes, two VTOLS and two planes. One of each type (VTOL or plane) had an Air Speed sensor and performed noticeably better in CRUISE and LOITER modes. I am convinced that the AS sensor provides a much quicker response to wind changes than just using GPS speed indication.
Looking good! The transitions look smooth.
I concur. It really simplifies tuning the transitions and general performance in all flight regimes. I think it helps tremendously in achieving to tune for maximum efficiency, as well.
Good luck.
Thanks, rollys!
I see the US stock of FX-79s is back and there is a sale on the China stock for $109.
Hey Greg I’m doing the same to my fx 79 can I please ask what outputs did you use for the quad motors and then the fx 79 motor on the Pixhawk
Hi Jesse,
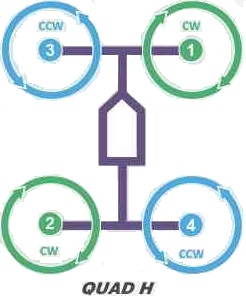
I’m using standard APM servo outputs from the Wiki. My quad layout is set up as an H-frame using outputs 5-8.
The elevon setup is here and the quadplane frame setup is here.
This thread will continue in the VTOL forum here.
Do you activate brake ESC ?
Hi Axwan,
No, I never use brake and just let the prop free spin.
Use the “here” link above to jump to the new section of this thread on the VTOL forum.
Cheers!