It looks like my analog AS sensor is working so I can try a flight next time with it enabled. I was probably flying faster than I needed to but I am uncertain of the stall speed with quad booms and landing legs.
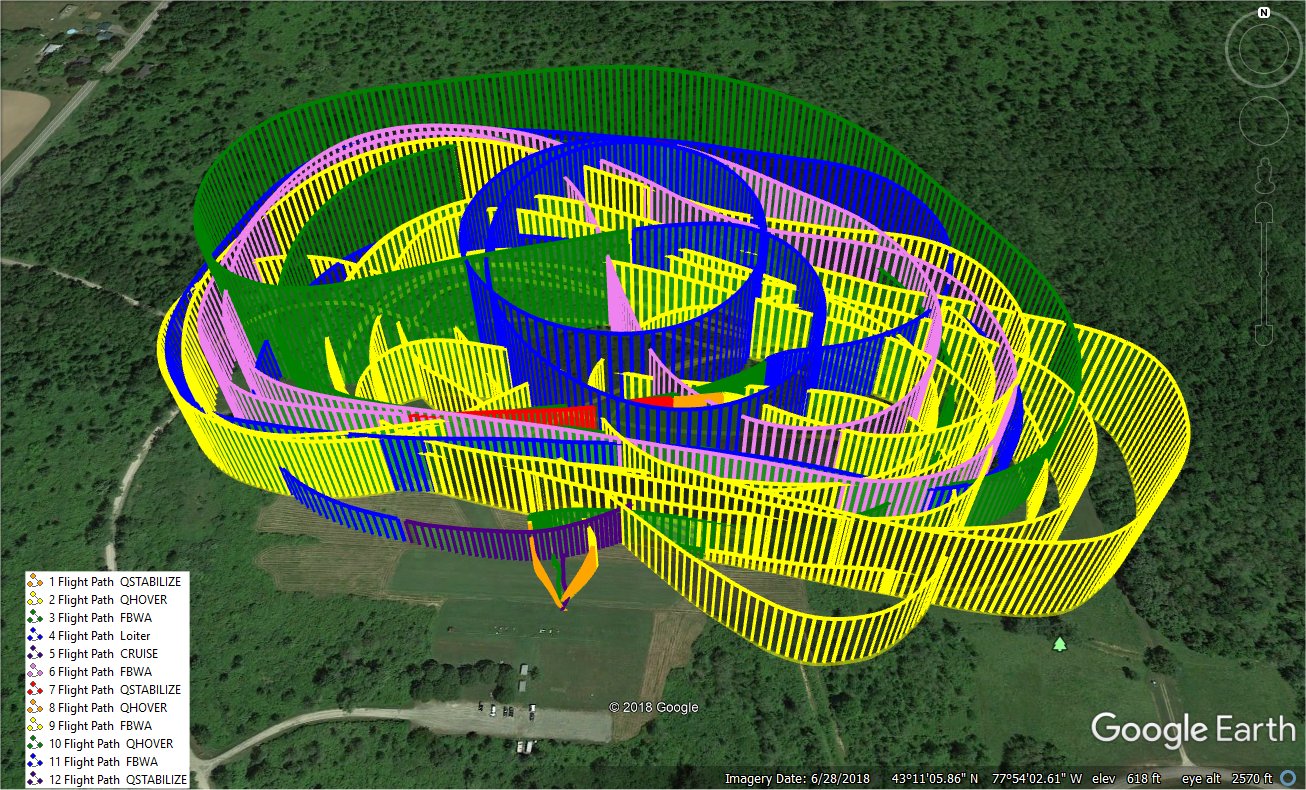
Here is two flights worth of travel. You can see from the take-off and landing "V in orange that “Mr. Lazy” doesn’t like to walk to the plane. 
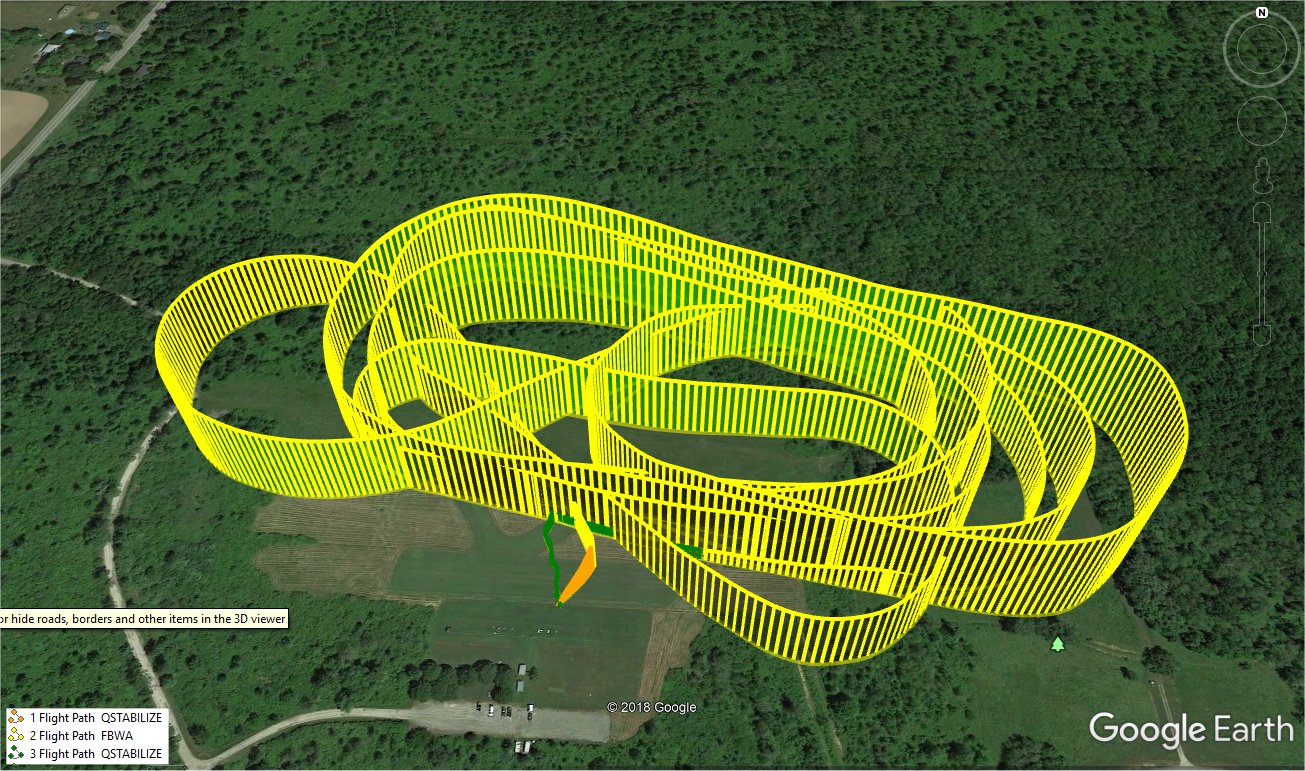
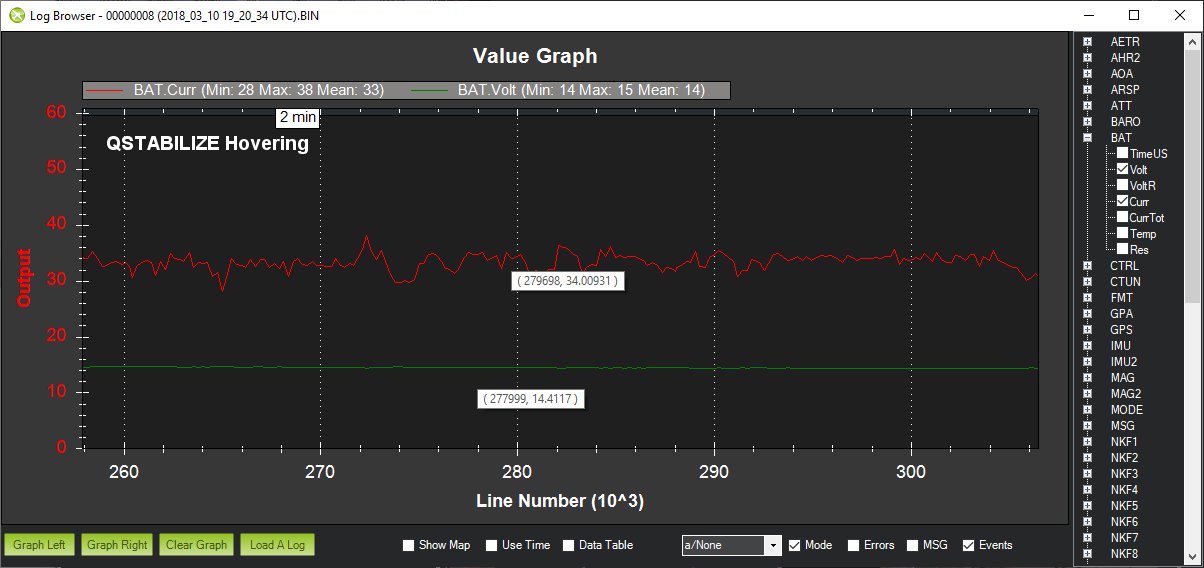
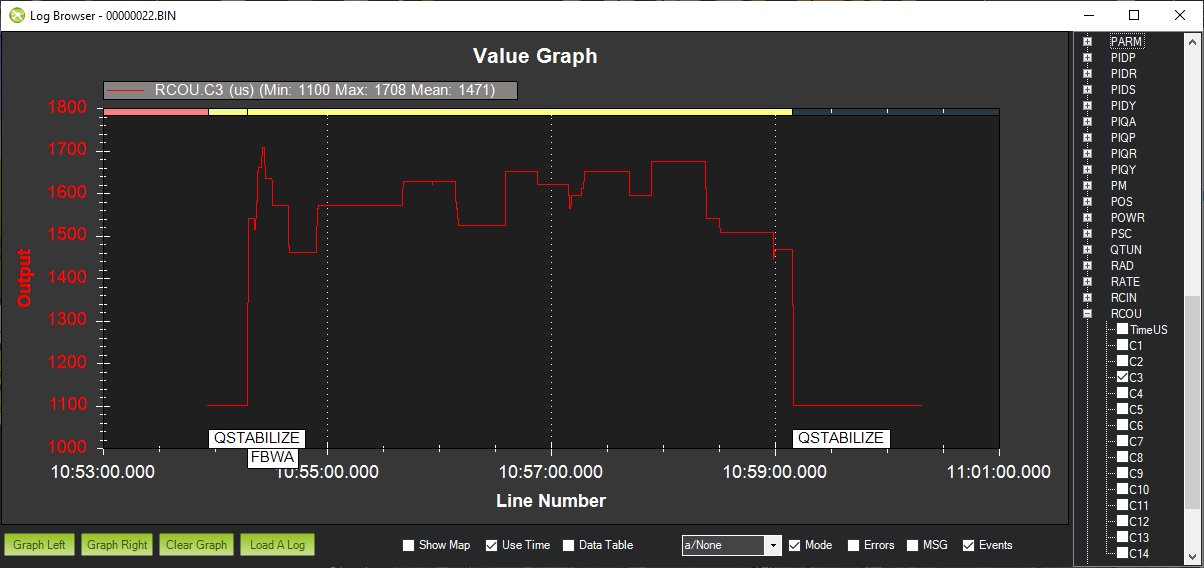
Here is one of the two latest flights from above, which was only FBWA flying so you can see the transition color change from orange to yellow on take-off and back to green for landing. The quad rotors put up a roaring sound but the plane always looks nice and stable when returning to QSTABILIZE mode.
Congrats Greg: how your analog AS go? I installed an analog one in my new build not finished yet and concern about analog AS fail reports, now in doubt if I have to change for a digital one before first flight.
Hi cala,
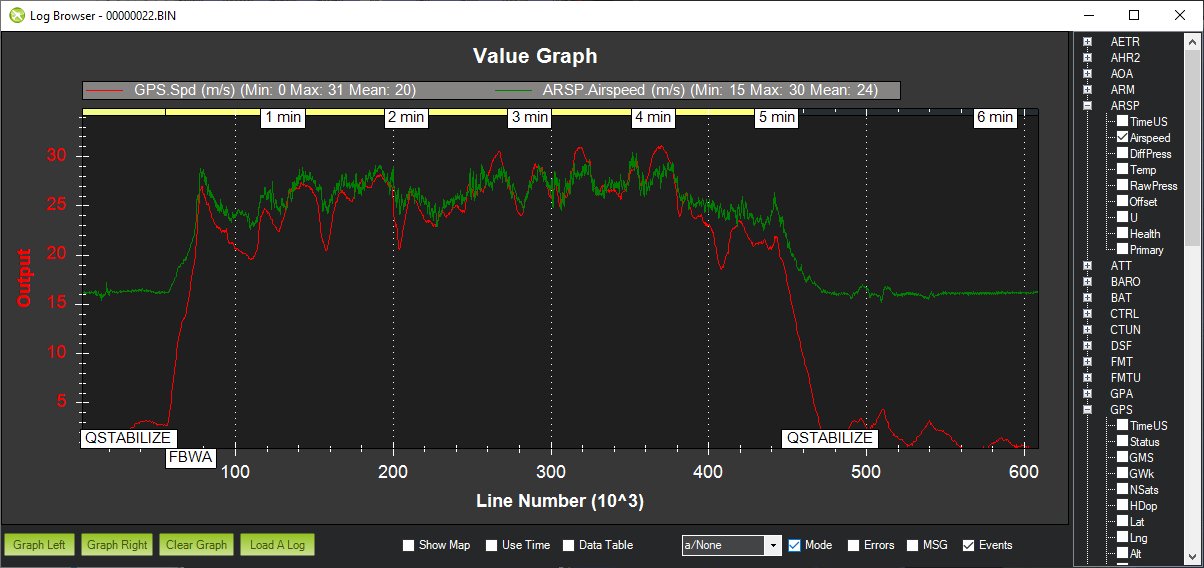
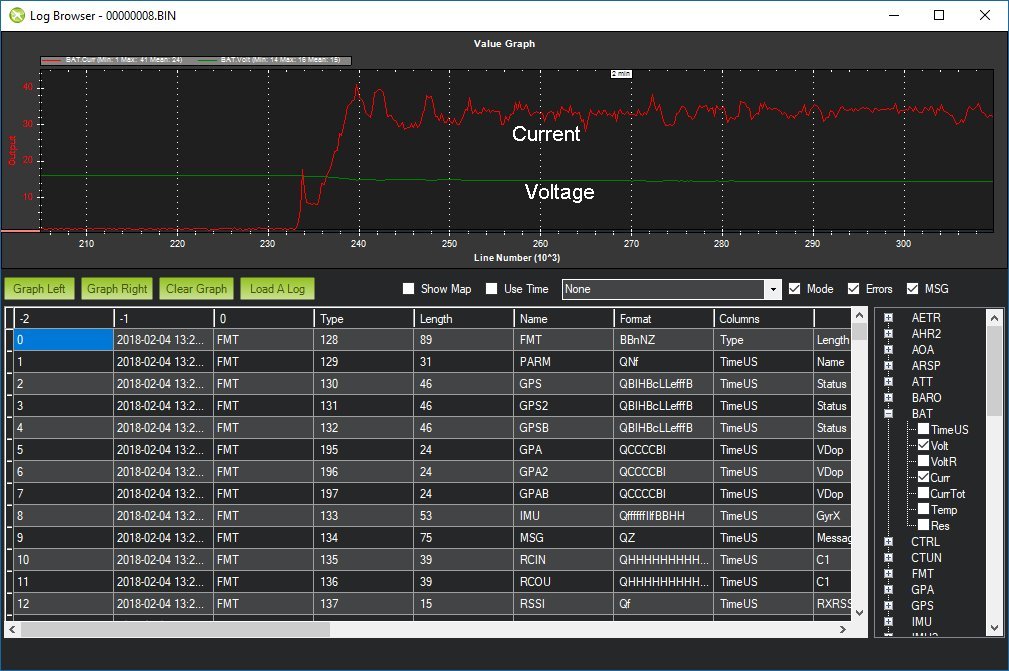
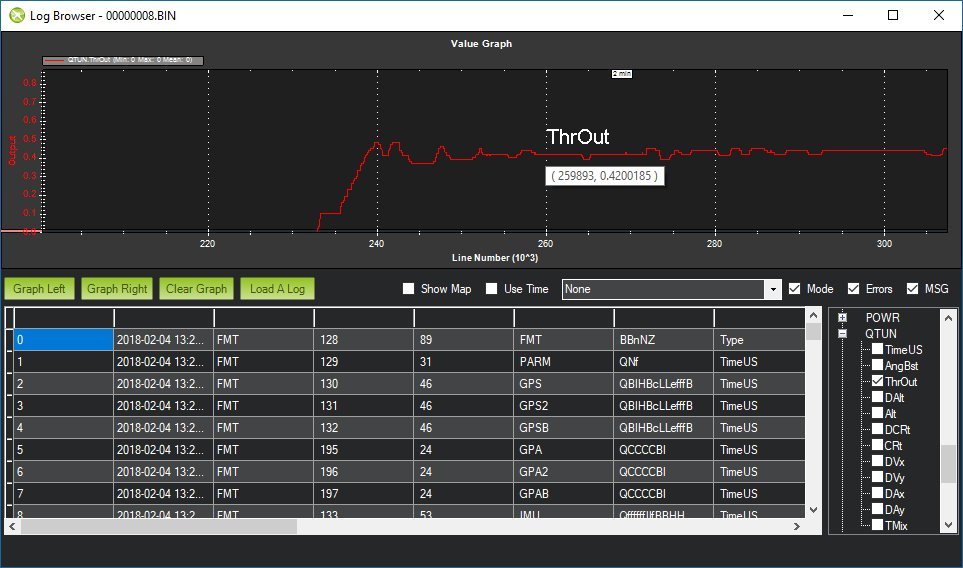
You can always test the AS sensor before enabling it. In fact, this is recommended since a bad or uncalibrated sensor can cause more harm than good. In my graph above, ARSPD_USE is set to 0 so it has no effect on the flight but can still be graphed to see that it is working.
Cheers!
1 Like
Nice idea to test first with log before use . Thanks
What flight times do you achieve with your setup?
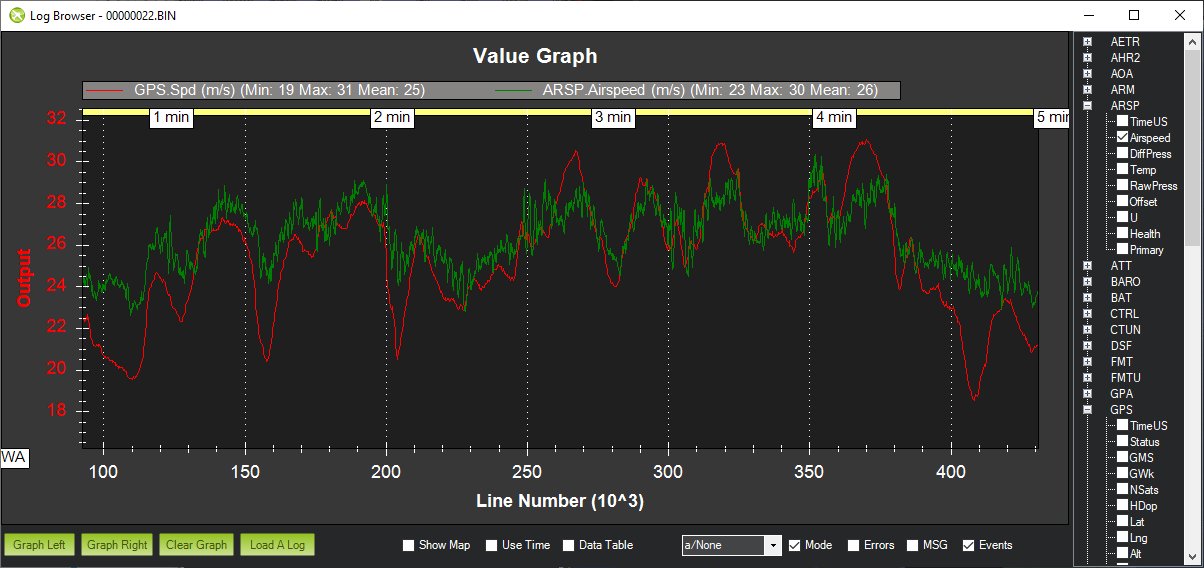
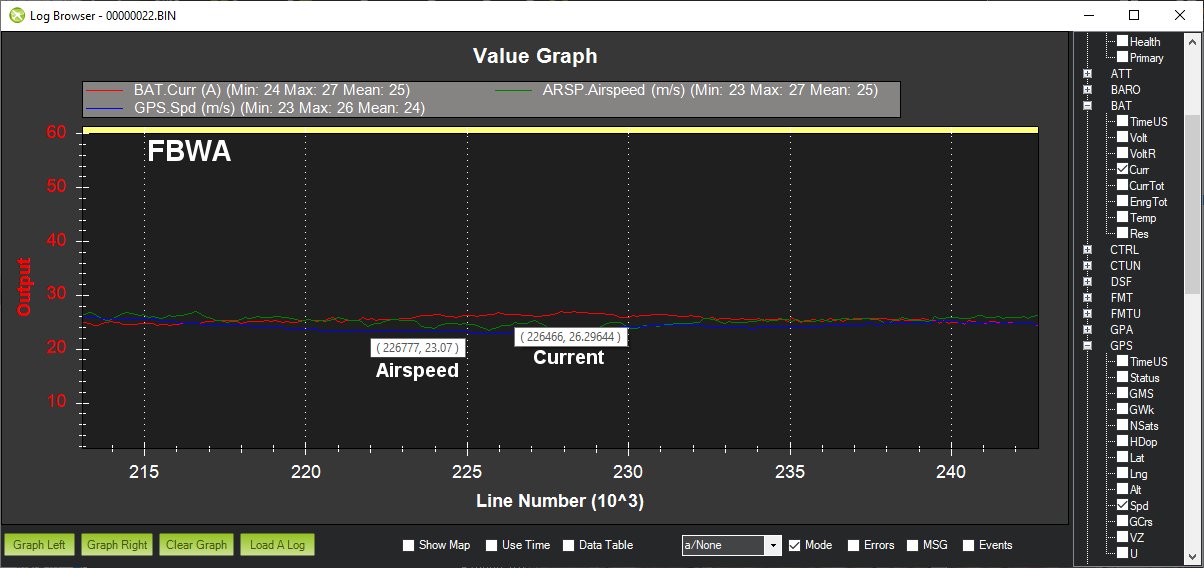
Here are the graphs for current draw in both hovering and forward flight in low wind. You can calculate your own flight time based upon this information and your battery pack capacity. Flight times will degrade when ascending, hovering longer, and flying against wind. In the second graph, the airspeed and ground speed are about 23m/s.
Cheers!
Hyperion has a nice deal on the FX-79 PNP version in the U.S. You can also try the coupon code “BLACKFRI” for another 10% off from 11/27/19 to 12/14/19.
Buffalo FX-79 PNP (EPO) - $109.95
I’m designing power system or my own fx79 quadplane conversion…
Could you say if the horizontal motors are significaly used in flight (between take off and landing)… ?
They are also used to help vertical motor to povide horizontal speed during transition… (to know if I have to change my motor for a bigger one…)… ?
Hi Mauris,
It seems to be fine for me. If you plan on using a heavy payload, you may want to increase power. Here are my graphs.
Thanks for sharing your graphs.
I think that I will entirely rebuild powering system :
-
I’m planning to install 20Ah (or may be 21Ah) 5S Li-Ion for vertical motor (Dualsky XM3548EA 740Kv 12x7 carbon folding prop ?) and embedded electronics (fpv, servos, flight controller…)
-
LiFePO4 6Ah 6S for each horizontals motors (GARTT ML 4108 500KV 1238 carbon props : already in stock…)
Could you post graphs for each horizontal motors or post a log file… ?
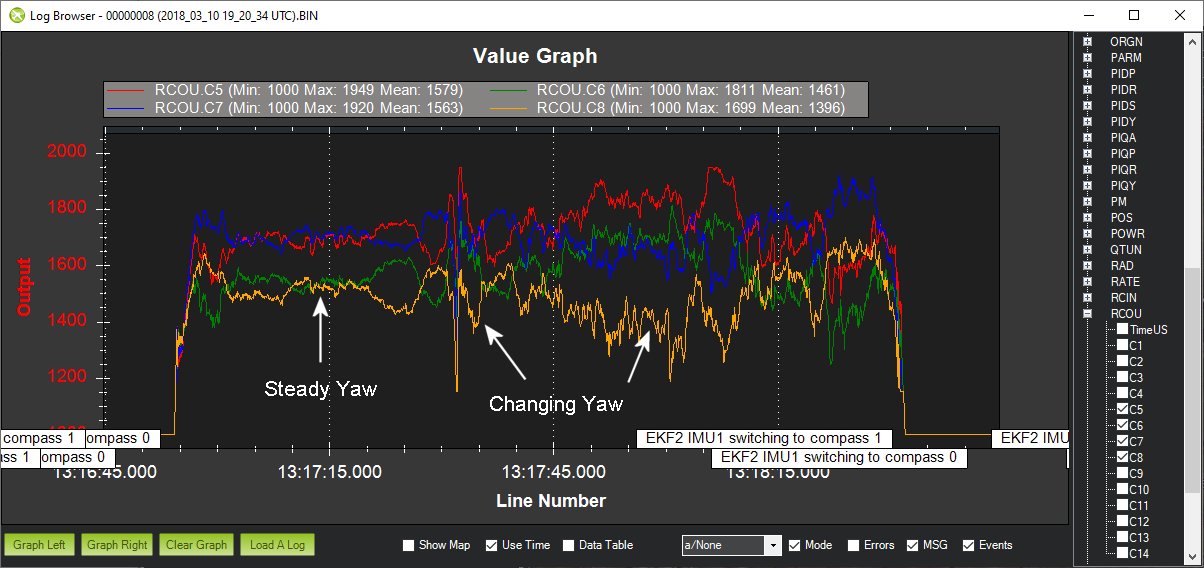
Thanks, but in fact I need of the following outputs values :
- Output 5: Front right motor, counter-clockwise
- Output 6: Rear left motor, counter-clockwise
- Output 7: Front left motor, clockwise
- Output 8: Rear right motor, clockwise
I have two carbon bars 1000mm length
What is the best length to optimize drag, aerodynamic efficiency… ?
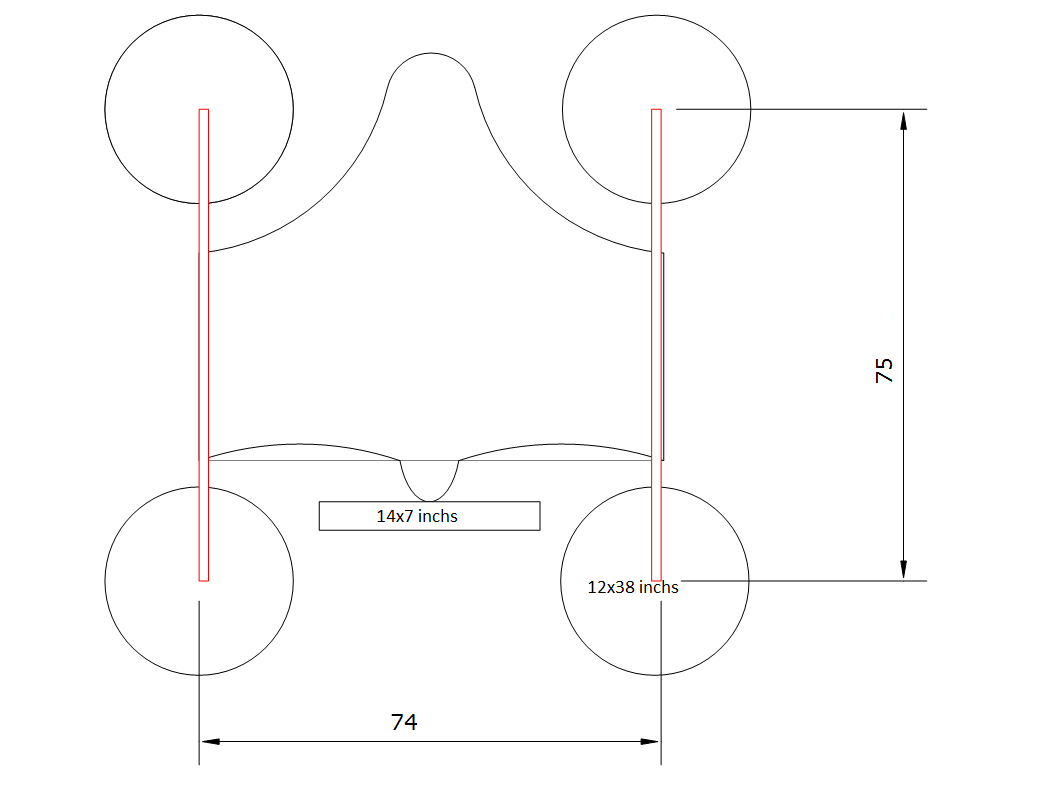
I think that I need 750mm length at least :
(values are in centimeters…)
Ok, those are the vertical motors, not horizontal and were posted above. See the graph with C5 - C8 just a couple posts above.
I have two carbon bars 1000mm length
What is the best length to optimize drag, aerodynamic efficiency… ?
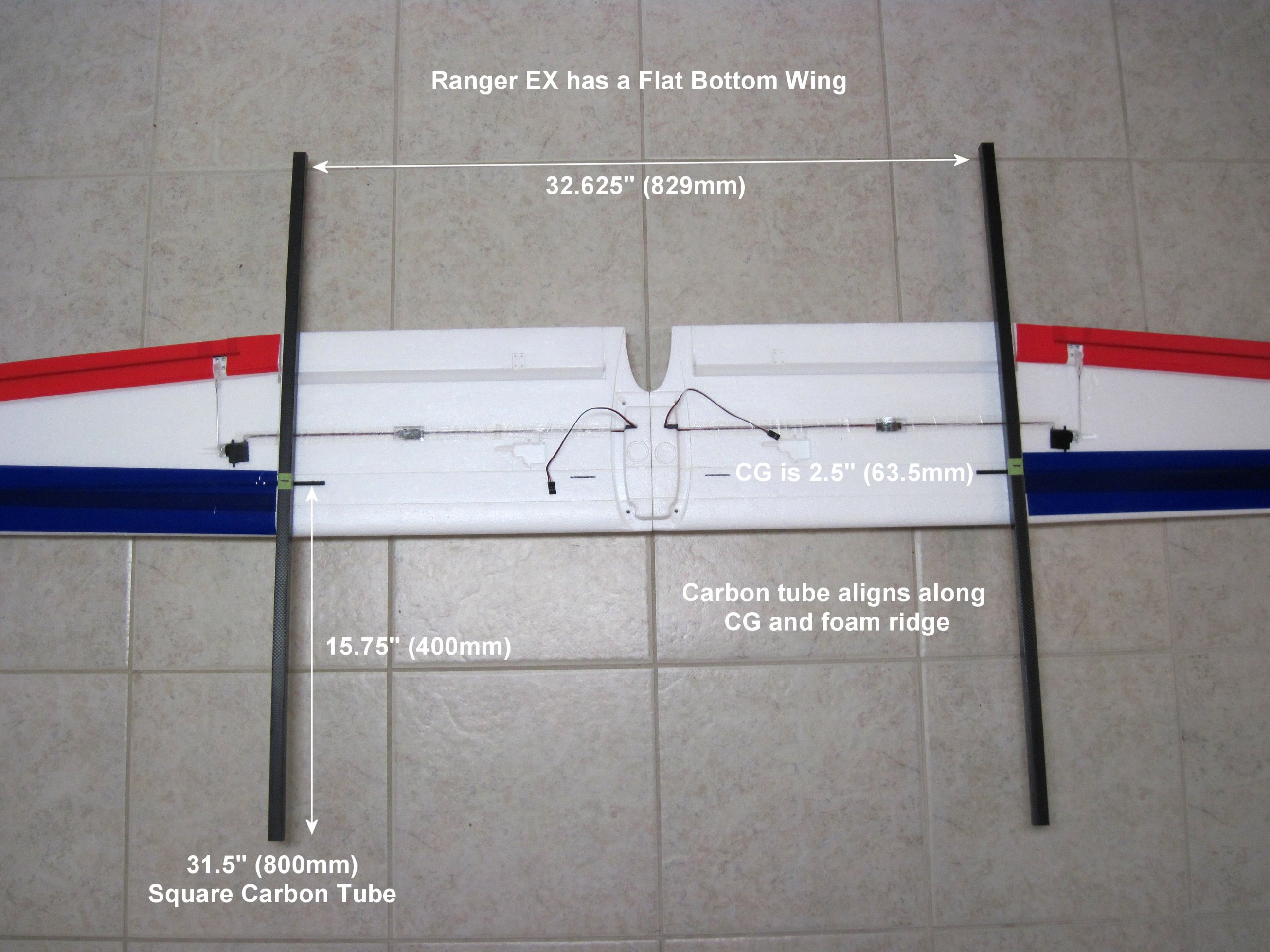
Mine were cut to 800mm in length. Originally I did this for another project but they worked perfectly on the FX-79.
Do you think that 3 kg max vertical thrust is enough for 6Kg total weight ?
I used SunnySky X3508 700kv motors with 12" RC Timer t-style props on a 4s 8AH Lipo pack. SunnySky x3805 700kv on 4s with 12” props (times 4) provides 6.4kg (14lbs) thrust. I cannot remember the all-up weight. Perhaps it is posted above.