uplink now, but both really
ok, later today I should be able to get you a lua script that decodes downlink and periodically sends uplink with full logging
Thanks Alex …
1 Like
Hi Eric,
I prepared a debug version of the lua script.
This sends a mavlite message 22 (param request read) every 5 seconds and decodes all incoming mavlite messages
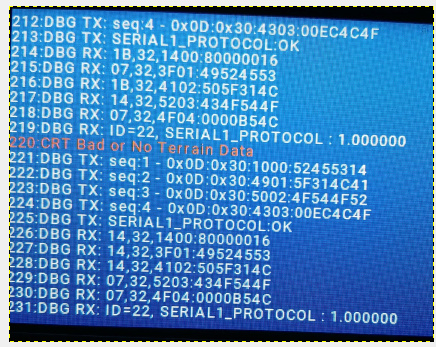
first packet structure:
1 byte for sequence
1 byte for payload length
1 byte for message id
3 bytes payload
all other packets
1 byte sequence
5 bytes paylod
at the end of the message a CRC i calculated which is not counter in the payload length
In this example the uplink message requires 4 sport packets (seq: 1 - 4) since the payload is just the string “SERIAL1_PROTOCOL” (parameters names are max 16 chars with dynamic length.
the value message requires 4 extra bytes to encode the parameter value as an IEEE 754 float.
The float is always encoded before the string since the latter has a variable length.
By looking at the code this should be much clearer 
ardupilotlua_debug_ver_0.1.ZIP (23.5 KB)
Thank you Alex. This will be very useful. I got a chunk of work done yesterday, but long way to go.
How do you determine that you have a mavlite message, rather than a frsky sensor message?
uplink = TX → RX (master)
single sensor i.e. responds to poll only for ID 0x0D, uses frame:0x30
downlink= RX → TX (slave)
responds to polls for IDs 0x1B, 0x67, 0x34. uses frame: 0x32
All downlink traffic is using frame 0x32, this is a special frame that OpenTX passes untouched to lua.
All uplink traffic is using frame 0x30.
Note: I will eventually switch to f.port convetions
where uplink (master traffic) is separated between read/write
Ok, got it. Thanks…
you’re welcome,
…did a little editing of the previous answer
Sorry, one more thing. Where can I get your ardupilot side repo / firmware? Is it the one on your git?
Starting .... C:\Users\Eric\Documents\GitHub\+esp32_wip\Mav2PT_TwoWay_v2.45c\Mav2PT_TwoWay_v2.45c
Target Board is ESP32 / Variant is Dev Module
Air Mode
Battery_mAh_Source = 3 - Define battery capacities in the LUA script
Using Serial_1 for S.Port
RSSI Automatic Select
Mavlink Serial In
Waiting for telemetry
ESP32 S.Port pins NOT inverted for Air or Relay Modes. Must use a converter
hb_count=1
hb_count=2
hb_count=3
mavgood=true
FrSky from S.Port: 0x0D:0x30:1000:52455314
FrSky from S.Port: 0x0D:0x30:4901:5F314C41
FrSky from S.Port: 0x0D:0x30:5002:4F544F52
FrSky from S.Port: 0x0D:0x30:4303:00EC4C4F
FrSky from S.Port: 0x0D:0x30:1000:52455314
FrSky from S.Port: 0x0D:0x30:4901:5F314C41
FrSky from S.Port: 0x0D:0x30:5002:4F544F52
FrSky from S.Port: 0x0D:0x30:4303:00EC4C4F
FrSky from S.Port: 0x0D:0x30:1000:52455314
FrSky from S.Port: 0x0D:0x30:4901:5F314C41
FrSky from S.Port: 0x0D:0x30:5002:4F544F52
FrSky from S.Port: 0x0D:0x30:4303:00EC4C4F
FrSky from S.Port: 0x0D:0x30:1000:52455314
FrSky from S.Port: 0x0D:0x30:4901:5F314C41
FrSky from S.Port: 0x0D:0x30:5002:4F544F52
FrSky from S.Port: 0x0D:0x30:4303:00EC4C4F
FrSky from S.Port: 0x0D:0x30:1000:52455314
FrSky from S.Port: 0x0D:0x30:4901:5F314C41
FrSky from S.Port: 0x0D:0x30:5002:4F544F52
FrSky from S.Port: 0x0D:0x30:4303:00EC4C4F
FrSky from S.Port: 0x0D:0x30:1000:52455314
FrSky from S.Port: 0x0D:0x30:4901:5F314C41
FrSky from S.Port: 0x0D:0x30:5002:4F544F52
FrSky from S.Port: 0x0D:0x30:4303:00EC4C4F
FrSky from S.Port: 0x0D:0x30:1000:52455314
FrSky from S.Port: 0x0D:0x30:4901:5F314C41
FrSky from S.Port: 0x0D:0x30:5002:4F544F52
FrSky from S.Port: 0x0D:0x30:4303:00EC4C4F yesss, looking good!
yesss, looking good!
1 Like
Another small step. We could use the param index rather than the id string.
Did I mention we are off to Australia for a month, leaving tomorrow? I have to pause this project now, but will work from there.
S.Port Read raw: 0D 30 00 10 14 53 45 52 0x0D:0x30:1000:52455314
S.Port Read raw: 0D 30 01 49 41 4C 31 5F 0x0D:0x30:4901:5F314C41
S.Port Read raw: 0D 30 02 50 52 4F 54 4F 0x0D:0x30:5002:4F544F52
S.Port Read raw: 0D 30 03 43 4F 4C EC 00 0x0D:0x30:4303:00EC4C4F
Mavlite #20 Request_Param_Read :SERIAL1_PROTOCOL:
Mavlink from FC #22 Param_Value: param_id=SERIAL1_PROTOCOL param_value=2.0000 param_count=802 param_index=65535great Eric ![]() the mavlite decoder is working!
the mavlite decoder is working!
[Q] are you doing your testing in air mode or ground mode?
yes I know but to get the index I’d have to query the param first and cache the response.
In a regular GCS I’d do it this way but in lua I’m already using memory to store paramenter names and I opted to trade some memory vs speed, but I’m open to change it, actually it would improve speed quite a bit but only after the first pass with full parameter names.
yes you did ![]() have a nice trip Eric!
have a nice trip Eric!
Air mode right now. Thank you. ![]()
@yaapu I’ve done a PR for an implementation of FPort here:
This support FPort for RC input. I’m hoping you can give me some assistance with the 2nd part of this, which is to use FPort for the SPort pass-through output as well.
What I need to know is how to deal with the “prim” and “appid” fields that come in with a FPort control packet and how they relate to the sport IDs in the ArduPilot sport passthru code.
Hi @tridge,
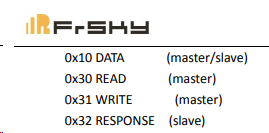
prim_id is the frame type, ardupilot as of current (no bidirectional) only used 0x10, so each packet sent down the link had 0x10 as prim_id.
app_id is used by regular frsky sensors to distinguish “instances”, but ardupilot used it to mark packets with prim_id 0x10 as passthrough by using for app_id a “special” range above 0x5000 known as the DIY packet range.
By using 0x10 as prim_id and 0x5000 ad app_id the payload is only 4 bytes, OpenTX passes to LUA all 0x10 packets with app_id in the DIY range.
downlink/control traffic (master → slave) should use prim_id 0x00/0x10(R/W), 0x30(RO), 0x31(WO)
uplink traffic (slave → master) should use 0x10 and 0x32 where 0x32 is special because OpenTX always passes 0x32 up to the lua stack irregardless of the app_id, in this case the payload is 6 bytes, app_id + data.
-
every time we receive 0x10 or 0x00 we have a chance to send passtrough telemetry data
-
every time we receive 0x30,0x31 we should invoke the bidirectional passthrough packet decoder by passing app_id and data (6 bytes) (we will eventually respond with prim_id 0x32)
-
we respond to 0x00/0x10 with 0x10, and to 0x30,0x31 with 0x32, so for 0x00,0x10,0x30,0x31 the passthrough packet scheduler should be invoked.
hope this makes sense, later tonight I will have the time to check your code,
great stuff ![]()
Edit: I got your branch working on a Pixhawk1 + X4R, I wired the X4R sport pint to the RCIN pin
To process incoming packets from LUA (master->slave) you provide the decode_downlink() method, what we need is a method to write to the bus an fport_frame, something like send_uplink()
I hacked together something for the F765-Wing which works with yaapu telem over fport. It is pretty ugly at the moment, but I think I can clean it up.
One thing that is wrong is the uart pin is idling high, whereas it should idle low as the fport signal is inverted (using a X4R). I checked with inav on the same board and it idles low. Something wrong in the uart config.
great! If you think I can be of any help, let me know!
I’ve updated the PR with first working version. To use it you need to set some serial port with:
SERIALn_PROTOCOL=23
which sets the serial port as RCIN. You will also need:
SERIALn_OPTIONS=7
to enable half-duplex inverted. After that the passthru telem output should work.
I’m looking at the possibility of supporting the output using soft-serial so it can work with a uart. FPort input does work in the PR for input without a UART, but not yet for output.