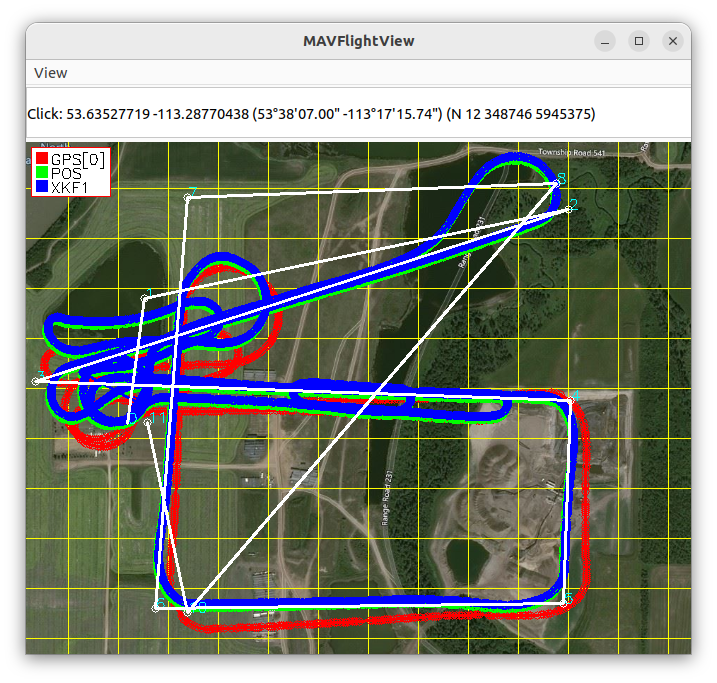
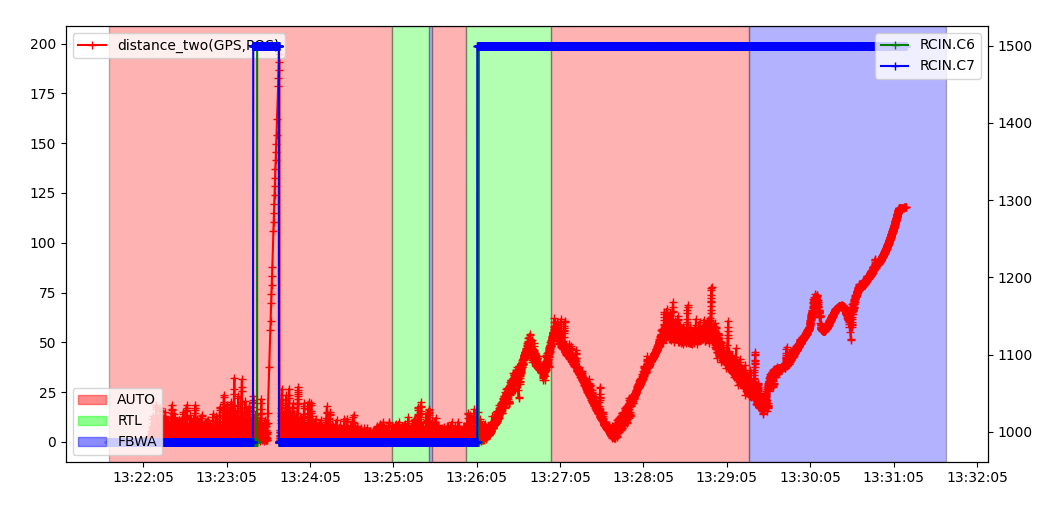
After repairs I now have a simpler plane. I disabled the GPS partway through this longish mission on a day with absolutely no wind (Oh - and a working AirSpeed sensor!) and got this.
I think it looks pretty good (as far as dead reckoning goes) - or maybe I’m missing something?
@timtuxworth that worked, but wasn’t quite a correct test. You should have made RC7 go above 1800 to disable GPS. The switching to a non-GPS EKF source isn’t quite the same thing as disabling GPS.
The results were good though:
I got 3 flights, switched off GPS on each and switched to second EKF configuration to avoid fallback to DCM. I let the plane fly as long as I felt safe on no GPS. I think there might have been a breeze up higher as there was some drift especially on the second flight. This was running on 4.4.0 beta 4.
I’m kind of disappointed, is this the best we can expect? Should I be doing something different?
Another flight at a different location. 0m/s windspeed where I was standing. Same plane, same FC. After about 3 minutes it was off by about 150m so I pulled the trigger and re-enabled the GPS. Looking forward to some more ideas @tridge …
Just want to note 2 recent improvements to the DCM fallback code that might help with this. I’m hoping to do some more testing of this soon, so don’t want to forget
what do you mean by this?, I have set one switch, to switch between AHRS:EKF3 AND AHRS:DCM, i want to test the AHRS:DCM with GPS disabled and how dead reckoning works from the last gps fix.
Also when AHRS;EKF3 is active and when i disable the GPS, it falls back to AHRS:DCM, does that mean AHRS:EKF3 does not provide dead reckoning support in latest ArduPlane 4.6 build?
If we disable the DCM fallback in fixed wing plane and disable the GPS, then the EKF3 supports the location dead reckoning? The dead reckoning in this case (no airspeed sensor is used, only compass, barometer and IMU are the available sensors) is just getting the speed from the intergrated accelerometer data from the IMU and multiplied from known time interval right?
What is the best way to get AHRS:DCM Dead-reckoning results without GPS once the home position is set from the GPS fix, when tried to walk with the plane with GPS disabled, the live view in the mission planner maps looked almost same as the AHRS:EKF with results. Further more when i disconnected the GPS while moving, the live plane shown in the mission planner map window disappeared until unless I connected back again.