Hi guys,
I am trying to revive my main drone after a crash, I thought only the props and the gimbal were damaged, but strange things are happening with it.
Let me be brief, I installed the latest 4.0.4 stable on it. It was previously on 4.0.x, can’t remember which.
Oh, by the way, the crash was stupid pilot error (me), trying to land too fast due to depleted battery.
So, I started from scratch, recalibrating everything, radio, accells, compass.
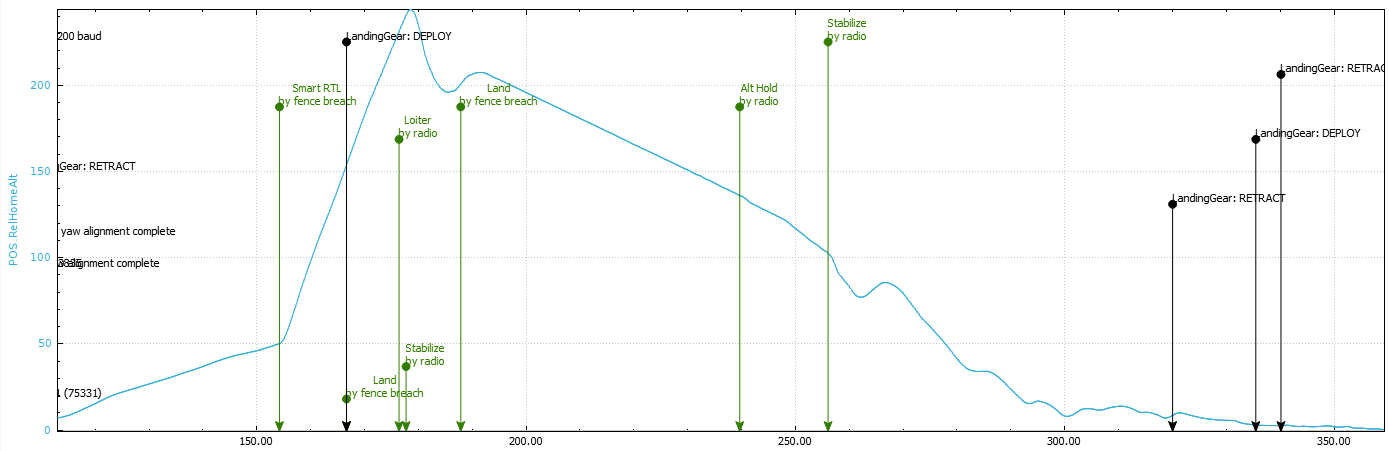
This was my third test flight, the main purpose was to get a hover thrust for the notch filter, so I turned on hover learning (learn and save). I started in stabilize, then activated alt hold and tried to hover, but it seems I wasn’t too successful, it kept slowly climbing, and then it hit the fence altitude and all hell broke loose.
It rocketed in the air, reaching 241 meters and then stopped.
Unfortunately my telemetry wasn’t working (a relict from the crash), so I wasn’t aware what was happening, but as soon as it started climbing I switched to stabilize to get control of it but without effect, so I even thought I lost the radio link. After switching several times from stabilize to althold (loiter) and vice versa, I noticed that the small dot in the sky was responding to roll, so I lowered the throttle almost to zero, until I finally managed to land it safely.
Looking to the log I cannot even find the first switch to althold as it didn’t even happen, damn telemetry not working when you need it the most…
Anyway, it seems to me that the problems started when I hit the fence altitude, it switched to smart rtl and tried to go to the moon. There are a ton of fence errors in the logs don’t know how to interpret them.
This quad was not tuned, so it is flying like a drunk sailor…
The dynamic notch filter was the first on my list before tuning, but now I will first solve the telemetry problem, to have some info about the state the FC is in real time.
My fence settings were not my standard, I don’t remember setting such low values, usually I set a 150m altitude and at least 300m - 500m circle.
If someone could look at the log and tell me why it rocketed to the sky at full speed when breaching the fence, I would really appreciate it.
Here is the link to the log:
Log file