This was the “setup” for the test:
I have an idea what might have happend to your Pixracer. In contrast to the classic Pixhawk, the racer does not have any level shifters/buffers on the servo header pins. Instead, the MCU pins are directly exposed. There isn’t even a protective resistor in series with the pin, which can be considered a design flaw IMHO. If you pull that pin to 5V hard enough, there is a very good chance to instantly kill the STM32 or at least that pin. Even shorting it to GND might be dangerous while the pin is still configured as output.
Here is what I did:
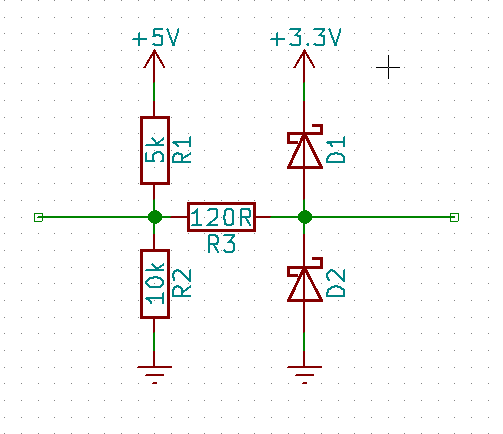
This solutions seems to work quite well with 3.6-dev. No spurious CAM messages and the PixRacer seems to be still alive after a few hundred trigger actions. I soldered the diodes (BAT42) directly to the board, while the three resistors are part of the cable. The diodes might be not strictly necessary, but given the long wire usually connected to the pin, it just feels better 
1 Like