To answer my own question about stall prevention function, It seems its function is actually a bank angle limit, not as I thought, an attempt to limit AOA. The ARSPD_FBW_MIN is no applicable in FBWA so it can easily be stalled, as I discovered.
Hi Vince,
the stall prevention function does something in FBWA (Low throttle pitch down trim), but very little:
See Parameter STAB_PITCH_DOWN ( 2° preset)
https://ardupilot.org/plane/docs/parameters-Plane-beta-V4.4.0-beta1.html#stab-pitch-down-low-throttle-pitch-down-trim
Rolf
the stall prevention function does something in FBWA (Low throttle pitch down trim), but very little:
What it takes to keep the aircraft flying without a stall
Yet another parameter I hadent noticed before. Probably in my case it wouldn’t have made a difference as I was deliberately investigating the stall and discovered that FBWA does everything opposite to a normal recovery technique. Full back stick and pick up a dropped wing with aileron.
Sounds like the default 2° target isn’t aggressive enough for typical stall behavior on your craft. Unfortunately, the aileron input is likely unavoidable, as I don’t think that rudder rolling at high AOA is an ArduPilot behavior. I’m guessing the throttle chop is an anti-spin measure.
Maybe someone a little more versed in the Plane ecosystem can explain why airspeed scaling and a fixed attitude target is used rather than synthetic AOA for stall protection and recovery?
Yuri, I was watching the synthetic AOA while checking low speed behavior. I didnt think it was giving very useful info actually so dont think it would be a great help with stall prevention and may just cause more unpredictable events. (But it could have been telemetry lag) I see there was some talk on github a few years ago of adding support for an electronic AOA vane. I dont think it went anywhere as I cant see any parameters about this. I think there are now small enough rotary encoders to make this worth perusing.
1 Like
Actually, I think I’m mistaken about stall recovery. That 2° pitch target is a stall prevention measure at low power settings that I find maybe a little weird. I understand it, I suppose, and the logic isn’t wrong.
What it isn’t is a stall recovery target. I see no such thing as I revisit the wiki. So AP will just naively keep striving for your demanded attitude target no matter how unachievable if critical AOA is exceeded.
Shame that synthetic AOA didn’t appear more useful. On a large/expensive model, an AOA vane would be almost mandatory, in my mind.
1 Like
I think I’d consider putting STAB_PITCH_DOWN on a switch and a script that toggles it between 0 and 3 degrees. Leave it at level pitch for normal flight, and flip a switch to target 3° at low power settings for a trimmed approach.
i guess i need to experiment with a stall in fbwa (haven’t done that yet).
is my following statement in agreement with your conversation: (?)
… when my planes’ engine would quit in flight (fbwa), the nose would automatically lower to maintain min air speed, no matter how much up elevator i added from the Tx. this worked to prevent a stall, so i accepted it even though it prevented me from flaring and avoiding a nose-in dead stick ‘landing’.
Following my recent experience I think you need to be really careful with FBWA (& probably all auto modes) near the stall. I dont think the AP will know your motor has quit so you wont get the STAB_PITCH_DOWN thing unless you also close the throttle. As far as I can make out, the ‘Stall prevent thing’ only increases your min speed in banked turns - by using the motor - which you dont have any more.
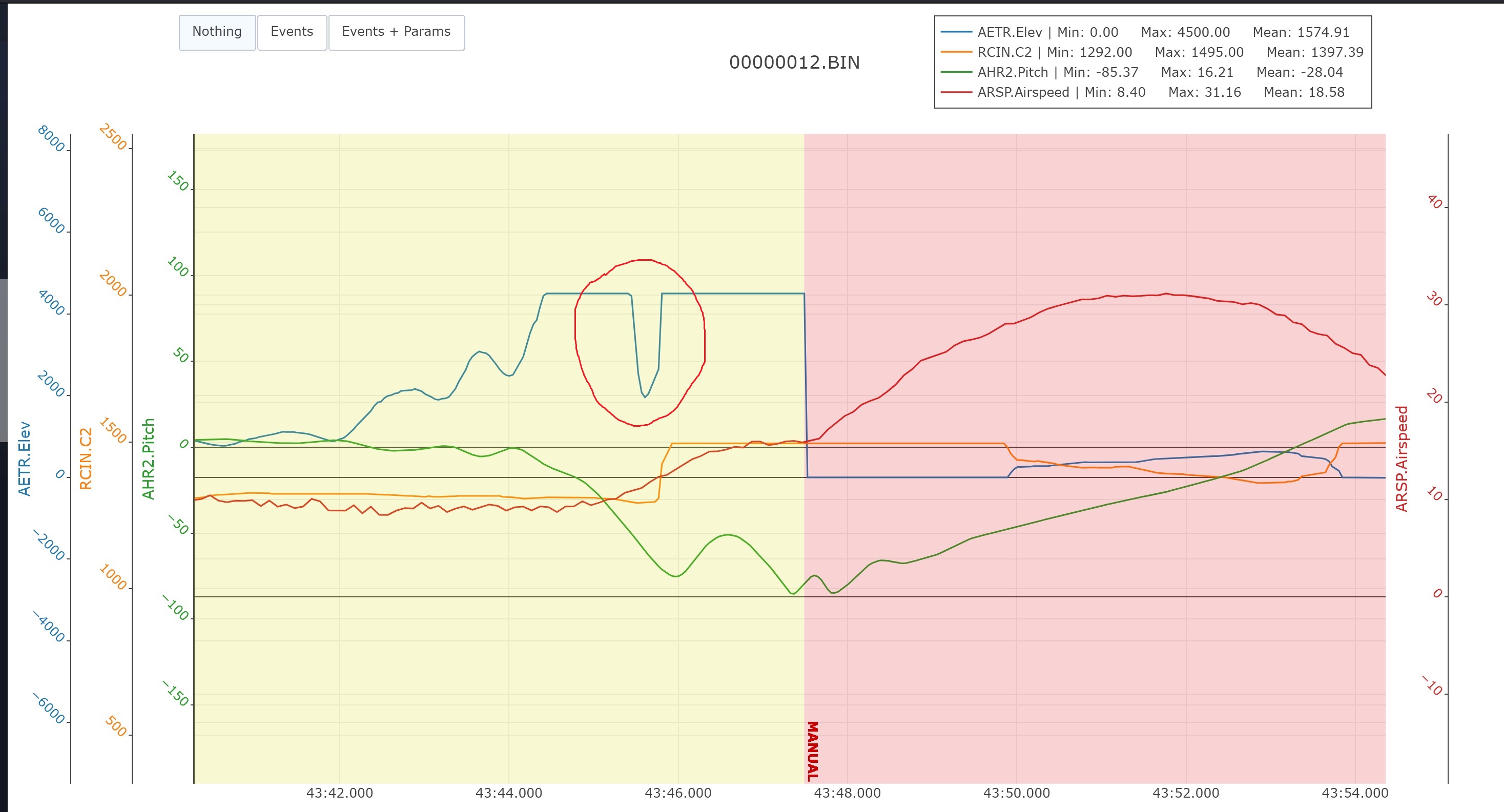
If you see my graph above, the AP puts full up elevator at the first sign of nose drop.
My suggestion - if you want to check out the stall region, do it in manual, otherwise make sure the settings keep you well away from stall.
FBWA will just keep the plane level, so if you have an engine failure you’ll still be able to dead stick the plane down without (additional) issue. And I say this from lived experience.
i read through the arduplane wiki again and see what you guys are saying. guess i just got lucky previously.
weird how STAB_PITCH_DOWN is triggered by throttle position, but not airspeed. that means landing is gonna revert to a throttle position behavior instead of airspeed.
.
i know this is drifting off the OP topic, but FBWA and STABILIZE modes ‘would be’ ideal modes (theoretically) to land in, especially in windy conditions, except for this STAB_PTICH_DOWN operation. indeed, i sometimes land in FBWA mode, and i notice the effect of the elevator scaling towards down as i slow and try to flare - i can pull full-up (on the Tx) and the plane does not lift the nose. a few hold-you-breath moments (been flying rc planes for long enough to call that a ‘habit’) ![]() .
.
.
so, in an ideal world, it would be good to have a true “stall prevention” (based on airspeed also) that includes more than just roll (i notice AP has internal options to limit bank, increase throttle and lower the nose) in turns. planes also stall while going straight, eh? BUT ![]() it would ALSO be good to be able to slow down to land with ability to control the elevator to full up when necessary in those same flight modes (FBWA, STABILIZE) that prevent stalls while flying. min speed/min throttle are lower when landing than flying - closer to actual stall (and sometimes actuall stall as the wheels touch down). interesting dilemma.
it would ALSO be good to be able to slow down to land with ability to control the elevator to full up when necessary in those same flight modes (FBWA, STABILIZE) that prevent stalls while flying. min speed/min throttle are lower when landing than flying - closer to actual stall (and sometimes actuall stall as the wheels touch down). interesting dilemma.
Defiantly something strange going on with the manual calibration technique. One flight gives a correction of about 2.7 so I set in in parameters. Next flight manual correction suggests it should be 1.9. And so on over several tests up and down. I felt the true number should be around 2.1. Did an automatic calibration and indeed it came out as 2.1 or very close. Thought at first the manual calibration should perhaps be the SQR of the speed error not ^2 but logic says SQR is correct as we are talking about dynamic pressure.
Anyway I think I have a good setting now but dont understand how the manual correction is in error, or for that matter, how the auto system gets a good number.
Have learned to be very careful of the FBWA stall.
Also, any idea why the AP temporarily lowers the elevator, as if to prevent a stall, but then puts full back in again as the plane stalls? What other outputs to chart to explain this please? FBWA then manual recovery.
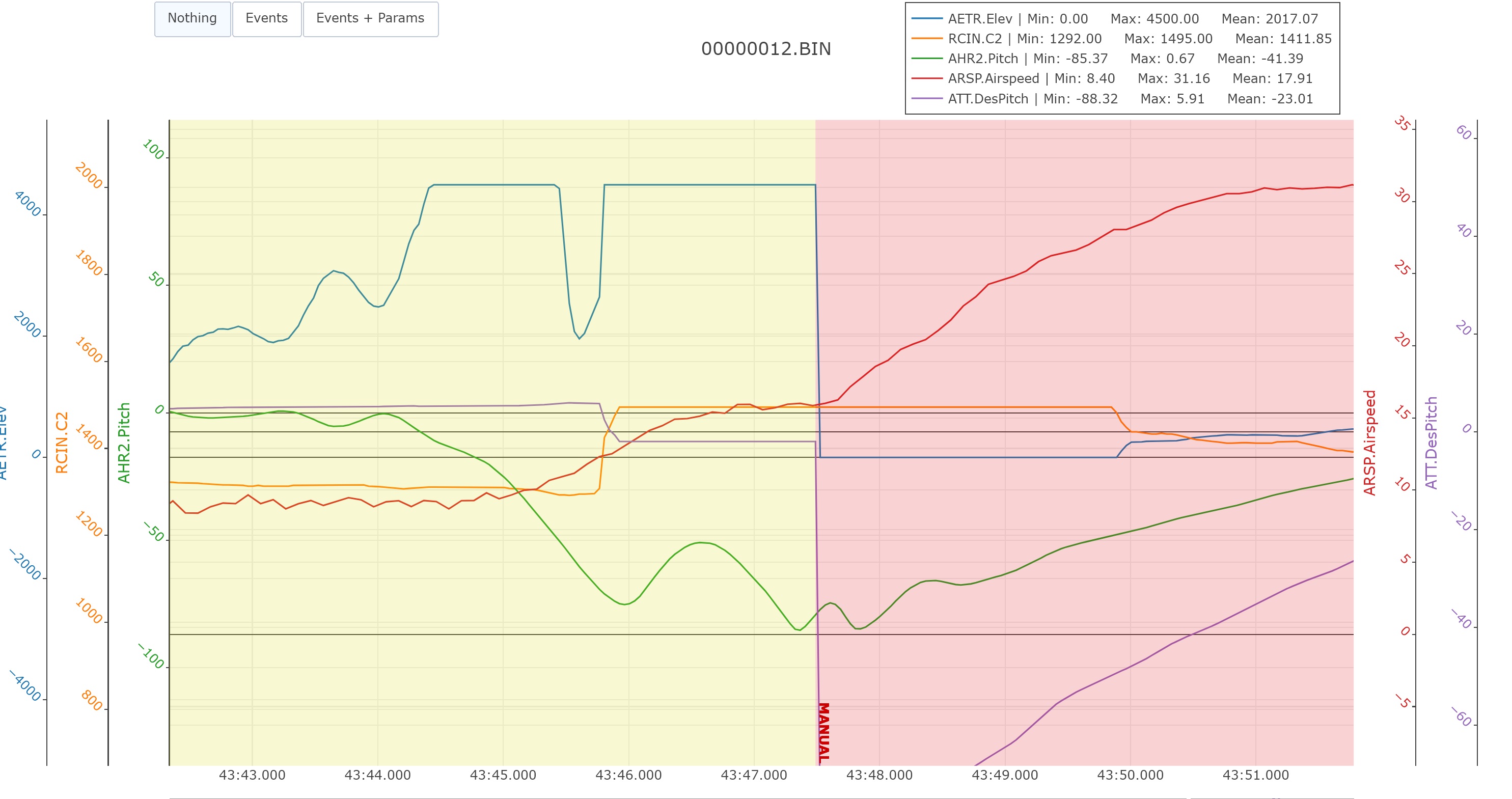
Plot the desired pitch angle. It’s just trying to maintain the desired pitch angle.
New one with des pitch. The dip in ‘elevator out’ happens while the des pitch remains high. Des pitch only reduces when I ease off back stick but the elevator returns to max up. Im just curious about that dip in elevator out. (blue plot)
Hmmm… Okay, I see what you’re asking now.
I’m not certain, but just a long shot: Plot the roll and desired roll. Did the plane drop a wing when it went into the stall? I just wonder if the bank angle was high enough that it was also reacting to that. Just making a guess.