I think we should change the mask output to work more like plane throttles, not really any reason to stick to the copter settings in plane modes.
@kd0aij @iampete
This is a video of flight test of the last binaries from post 1572.
great job, hover and fbwa flight is OK, transitions are perfect.
The yaw behavior is now symmetric and as expected.
Still this problem of motors spinning in fixed wing modes but not exactly as you said because with the last binaries they spin even when disarmed.
I have made 2 flights this morning, this one and an other with a lot of manual and acro flight. It was OK too. I have been unable to reproduce the weird behavior I had previously 2 time: In FBWA mode, when pitching up to around 80° at full throttle the wing suddenly went upside down. I think it is an airframe limitation but could be good to check with the SITL.
Also the altitude controller seems to be more sensitive in Q_hover mode.
3 Likes
the log of the above flight
1 Like

Flys very well! don’t think there is much room for improvement. I did see the speed wobble come on once.
The estimated airspeed seems quite good, I always assumed it would be rubbish when hovering, maybe we can do airspeed scaling without a sensor after all.
1 Like
gain attenuation was not strong enough as I had flaps oscillation at high lean angle. Gain attenuation based on airspeed would be far the best solution. Would it be useful I add airspeed on my test wing to compare estimate and true airspeed ? I need some time because I have no sensor available but this is very doable. Until now I have avoided to install one because I crash this wing very often and the pitot tube would get full of sand.
Another detail, since the beginning (arduplane 3.8.3), there is a small bug I never complain about as the yaw input is disabled when q_hover and throttle is at its lowest position. That is not a big deal but could it be corrected ?
1 Like
@losawing Great test flight, and thanks for the video and log.
I think your copter roll gains may be a bit too high though.
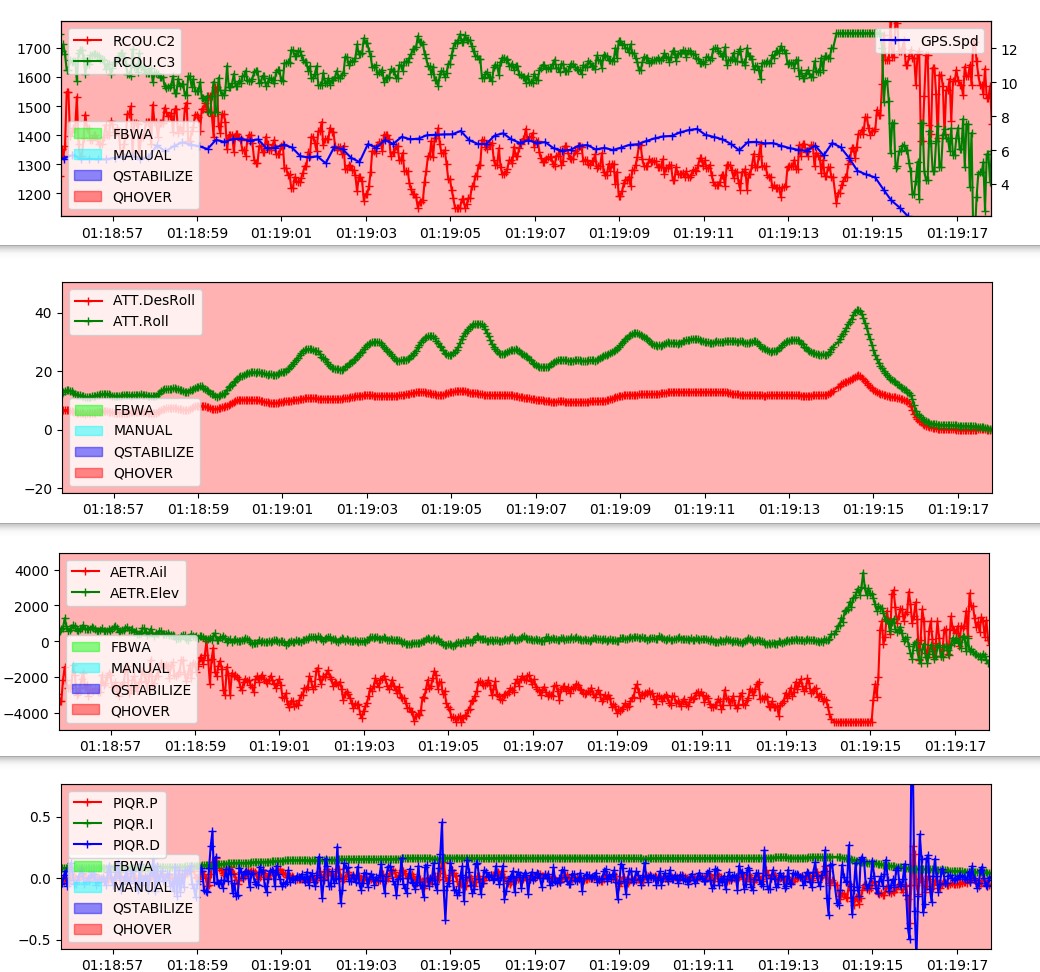
It looks like you’re getting roll oscillations at -65 degrees of pitch, but pitch is still pretty good. The D term looks a bit overactive too.
I think I lost a patch to keep motors from spinning at the wrong time… will resurrect it soon. Also, could you try flying with Q_TAIL_MOTMX=3 ? That should shut down the top/bot motors in FBWA. Check first that the right motors shut down, but it works OK on my Dart and SITL.
Also, what is your motor spacing span-wise and top to bottom?
@iampete Is that airspeed estimate coming from the EKF? I wonder if it would be accurate in hover with the wind blowing.
thanks for the tuning advises, I will test them next time.
I have already tested q_tail_motmx=3 but only ‘on the bench’, it works as it should. I did not have time to make a flight test because I have an esc related problem, I have to understand and to fix it.
Top and bottom motors spacing is only 22 cm. I have 18 cm propeller on these motors and 20cm ones on wings. But there is nothing clever behind that because motors are not the same size and kv. I have seen that a small spacing already gives a strong pitch stability. I had a similar experience with my jetwing which motors were only 16 cm apart. But both wing had vectored thrust and on my test list I want to set q_tailsit_vh=0.
I’ll be very interested to see FW flight on just the wing motors. It would also be interesting to see how it flies on just the top motor. If ESC braking is on there might not be much drag from the stopped props and FW flight would be very efficient.
I would also definitely like to see how Q modes work with the vectoring turned off since it would reduce complexity and weight to eliminate the tilt servos.
Has the firmware been updated to support Dshot yet? I have these ESC’s
http://shop.powerdrives.net/?product=120f3x
and am having 0 luck in getting them to recognize the ESC control signal coming from the Pixhawk.
yes, I’m using a 4in1 BlHeli32 ESC in my quad tailsitter
http://ardupilot.org/copter/docs/common-dshot.html
Awesome will try to look at what I’m doing wrong. Also, as a side note, I have some cobra ESC’s on another build that work but I can’t seem to get them to calibrate using any of the normal methods in Pixhawk. I have tried the normal way but get a AC3.3 error and then when I try using this method nothing happens:
http://ardupilot.org/plane/docs/quadplane-esc-calibration.html
I’m not familiar with Cobra ESCs or that calibration procedure. The last time I calibrated PWM escs, I just connected them directly to a receiver 
You’ll probably get a wider audience for questions like that on the forums though.
I tested q_tail_motmx=3
motors stopped as expected, transition were perfect
Changed parameters
Q_tailsit_angle from 40 to 30
Q_spin_min from 0.1 to 0.15
q_m_thst_hover from 0.4 to 0.55
q_m_spool_time from 0.5 to 0.2
ESC brake enable for top and bottom motors
1 Like
 This is looking very good to me. Power consumption drops significantly in FW mode and your back transitions are really quick:
This is looking very good to me. Power consumption drops significantly in FW mode and your back transitions are really quick:

I wonder how good the transitions would be without tilt vectoring though.
Now I need to build a plane like yours 
Which flying wing design would you recommend for a non-vectored quad (or tri) prototype?
amazing picture of the lake !! thanks
yes, back transition proceed faster when q_tailsit_angle is reduced
I plan to make more tests this WE to disable thrust vectoring and also change motor mask when loitering to see the power consumption.
It depends on your objectives: to make test, for endurance, for speed ?
My EPP flying wing is a hacker model
Flight quality are good but not great, cannot go fast or fly inverted but the material is really though making a good choice for test purpose. All the wiring and electronic can be hidden within the thickness of the wing and secured with hot glue. Flaps twist easily but at low speed it is OK.
2 more flights this evening after work. One good result and a bad one.
To begin with the bad one I tested q_tail_motmx=8 so only the top motor. Forward transition was OK but I had no chance to test the back transition. The wing lost 27m in around 7s despite high throttle. I expected something like that but not so strongly.
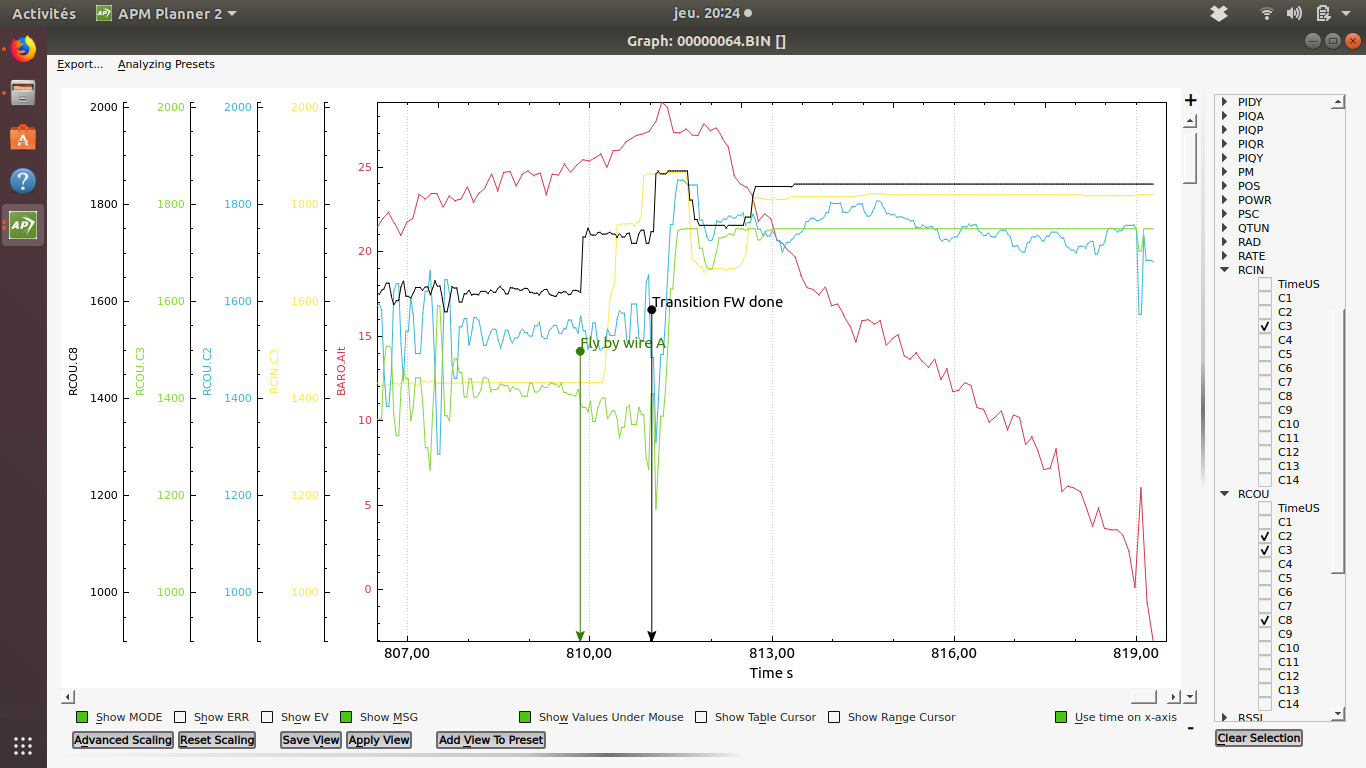
This is a graph of baro altitude. Flaps were full up to balance the motor thrust so we can not expect any lift from the wing. This experience point out the main weakness of flying wing as this type of aircraft reduce its lift when it try to pitch up.
The good result now: The previous flight and this one were done with all q_tailsit_v gain set to 0.
Transitions were exactly the same and hover stability almost identical. Maybe the yaw is less stable. Note that I changed q_tail_motmx to 8 only at the end of the second flight. Previously it was 15.
This is the log of the second flight
Thanks for the pointer to the Hacker flying wing designs. They look like good models at a good price.
Regarding design intent, I guess I’d like to see a good balance between speed and endurance.
I think a 3 motor non-vectored configuration might have an advantage over both vectored 2-motor and non-vectored quad-motor configurations.
Sorry that 2nd flight ended badly. I hope there wasn’t too much damage.
So I guess a flying wing can’t tolerate a high thrust line… that probably explains the trouble I’ve been having with simulations of a “plank” design with 3 motors… and why the X2 shuts the top motor down in FW mode.
But it’s great to hear that transitions went well without vectoring. That reduces the required complexity
quite a bit, in my opinion.
Thinking more about my next prototype, that Hacker Hotwing is looking good; enough wing area to fly efficiently in FW mode and lower sweep than the Stryker.
The hotwing from hacker is very good because it is unbreakable but you can not expect endurance or speed from it because the wing material and the design produce high drag and moderate lift. I put a 2.2Ah 3s battery in it and this is already enough weight for it.
I think my best wing is the batwing you can see post 1453. All design details are in the post. The wing is made of polystyrene (dense one) hot wire cut and covered with hard wood (yellow abachi wood) glued with 3M 77 spray. This wing lift easily a 5ah 3s battery and take only 55 W at 50km/h. I think it will be a great flyer with a quad configuration and with the added stability of the quad configuration a simple rectangular outline should be OK. Smaller 2208 motors instead of 2212 may be used to save weight.