This is at least how I proceed. This is surely not complete but a start if someone wants to add his own experience.
CG position :
To fly as fixed wing the CG MUST be somewhere between let’s say 15 to 22 % of the wing mean aerodynamic cord. The link bellow is a tool to calculate the M.A.C. and find CG location as a function of the wing design.
http://tracfoil.free.fr/cm/indexE.html
Keep in mind that the small fuselage of a plank wing may change the CG location by 1 or 2%.
CG in the middle of the wing thickness with respect to the Z axis is better. Check both wings are equal weight.
I think the hover is more stable when the CG is at ¼ of the wing cord of the wing section behind the propellers. For most wing design it means you take advantage to set the CG as close as possible to the neutral point of the wing. But beware that bellow 3 % of static margin there are a lot of chance the wing will be totally not flyable as a fixed wing.
Flaps:
Large flaps and ±40 ° throw for a non-vectored tailsitter. Less surface and less throw (±30°) is acceptable for a vectored.
Tilt motor : -45 +80 °
Both motor equal thrust
Parametrers
AHRS_EKF_TYPE=3
EK2_ENABLE=0
EK3_ENABLE=1
MIXING GAIN=1
Q_A_ANGLE_BOOST=0 (for vectored I guess but I am not very sure)
ARMING_CHECK =1
Q_ANGLE_MAX=2000 for first tests then increase step by step.
Q_VELZ=100 for first tests then increase step by step. This low value gives safe back transition (to q_hover) whatever the throttle stick position. Of course it will take a while to land.
Q_transition _ms : I don’t remember what is the default value but 3000 seems to me a good start.
Q_TAILSIT_ANGLE = 40
All Q_a_rate default values
Hover flight
Wait for a calm day without wind.
If your wing is vectored and takeoff from belly, remove propellers and switch to q_hover to verify is you get tilt motor oscillations. If yes you can break propellers. I have no solution for that.
Takeoff with q_hover or Q_stabilise mode, control there is almost no flaps or tilt motor oscillations, observe flaps neutral position.
Pull and release the elevator stick and observe, try to increase q_a_rat_pitch_p as much as possible, look for overshoot and oscillations.
Yaw the wing for several 360 turn and observe the EKF compass gauge.
Roll the wing carefully because it can go fast in that direction.
When after takeoff the wing drift in one direction (without wind) and take time to stop you can try to increase the relevant Q_a_rat_xxx_I parameter. But try to understand first why the wing is out of trim.
PID tuning take a lot of time, to save time you can test qautotune available in the last built. There is a dedicated qautotune blog.
When you are happy with your PID, increase Q_max_angle step by step.
If you observe flaps oscillation at high lean angle try to decrease Q_tailsit_thscmx from the defaut value of 5 up to 1.
If you observe throttle pulses while flying q_hover and high lean angle you can try all Q_AZ parameters.
Log analysis
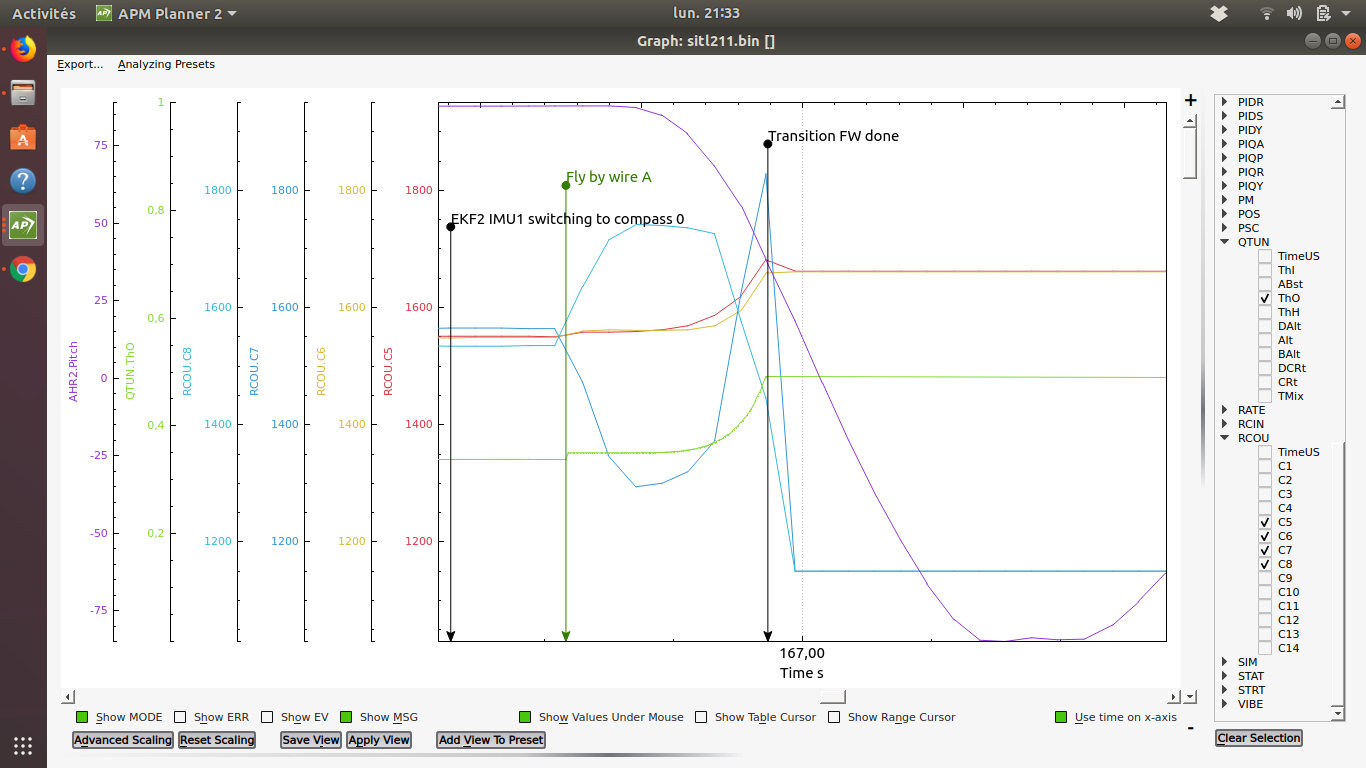
Plot Q_Tune - throut, look at the hover value and use it to set Q_M_THST_HOVER, Set Q_M_SPIN_MIN about 1/2 of hover value and not lower than 0.25. These 2 parameters are critical for transitions.
Plot XKF1 pitch, XKF6 pitch, AHR2 pitch, ATT pitch : curves should be superposed except ATT pitch
Plot XKF3 “IVN, IVE, IVD” “IPN, IPE, IPD” “IMX, IMY, IMZ” refer to the wiki for interpretation
Plot VIBE
Plot Power VCC and Vservo
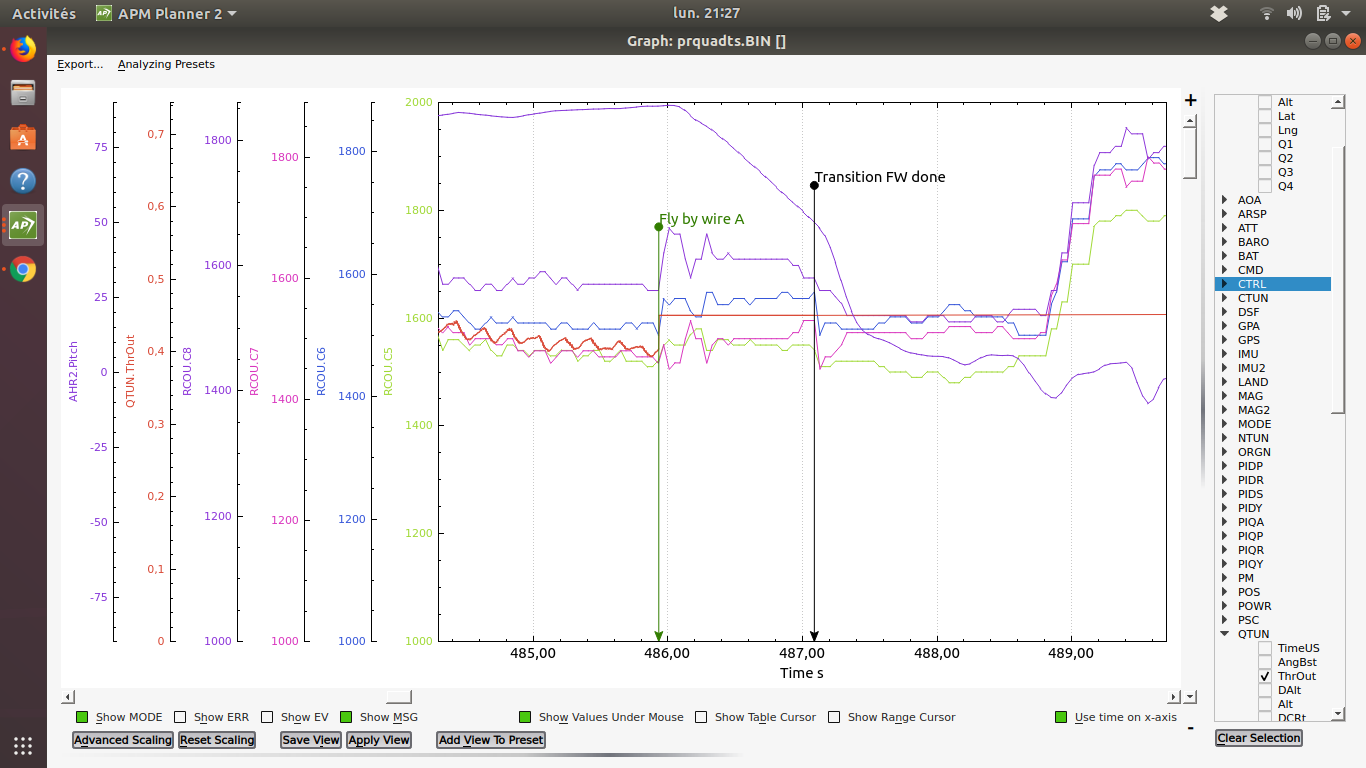
Transition
From q_hover to FBWA and fbwa to Q_hover: should be OK with above recommendations
It is always better to have the throttle stick centered.
If the wing has not enough speed to complete a smooth back transition, try to increase Q_M_THST_HOVER and Q_M_SPIN_MIN.
If you want the back transition to proceed sooner with less altitude gain try to reduce Q_TAILSIT_ANGLE
FW flight
Wait again for a calm day and proceed autotune as soon as possible.
For the beginning, avoid any back transition from an auto mode flight and do not use Q_loiter.
Q_tailsit_vf_gain is not really useful: a low value of 0.1-0.2 is OK.
Rudd_dt_gain together with kff_rddrmix allow using differential thrust as rudder. That’s very nice but should be increased carefully if you don’t want to make U turn.
Make the same log analysis as above except for the throttle tuning I use Ctune
Look at your flaps position when flying level at different speed and compare them to the neutral position. If your flaps are below (or at) the neutral position it may indicate the CG is after, that’s really dangerous.
good luck