Now it’s time to add my first video
Like you see, at the beginning everything is OK After a while, crash.
It was in a QStabilize mode but i dont know why it started to do these things, at the beginning it was pretty stabilize and then it started to wing himself. There were almost no wind, and i’m out of ideas
Hello Top gun,
I,hope you make some progress.
If you hold your aircraft manually and raise throttle in Q_hover mode, yes it takes several seconds to get more power. But If you release your aircraft (with throttle stick centered), as it begin to fall, throttle will raise in a fraction of a second. The same when your aircraft is in the air.
Pierre
After some practicing you may find that q_hover is much better than q_stabilise because vertical speed is constrained by q_velz_max and a taisitter is not able to get a high descent rate.
Thank you for the video, now it is time to tune PID and probably improve the wing design. What servo do you use, digital ? fast enough ? weight of the aircraft, propeller size, elevon throw… there is lot to test.
Yeah, what do you mean improve wing design?
I’m new in this area, but it looks very interesting.
Also my deadline is in next weeks end, so i’m really in hurry Like always, leave all fast things to the end
But do you think this is hardware problem or more physical problem?
PS. DO you know some safe way to test my plane? Right now i’m tired of prop changing and small repairment
I have switched early to vectored belly sitter so I have almost no experience with traditional tail sitter. Increase the airspeed around elevon is obviously very important. So maybe heavier airframe or smaller airframe with same weight. smaller propeller ? right CG position, strong (min 4Kgcm) and fast (0.1s/60°) digital servo …
Did you check EKF status while flying ? You are flying with a lot of steel around, your compass may not be happy.
From your video, your wing seems to be unstable along the pitch axis. Try to Increase q_a_rat_pit_d until you get oscillations (then halve it) and after q_a_rat_pit_p as much as possible. you can try to increase q_a_rat_yaw_I to 1.
Some here have attached their wing to a test rig with success in order to tune PID but I cant tell more.
Also i have 1 external compass, and internal pixhawk compasses. I attached external compass, calibrated and EKF didnt turn red when my plane was on the ground. When i rotated it very much then it went to red? Is this normal?
Also any good ideas hot to test safetly my plane so i dont have to repair it every single time?
EKF gauges must not turn red.
when you calibrate compasses, do you see 2 mag ? if not you have a wiring problem. When calibrating, change default level to strict level.
Is your 2 compasses enable ? and external one chosen as first compass.
Most important, check external compass orientation and read the following link http://ardupilot.org/plane/docs/common-compass-setup-advanced.html
Also, what is the pixhawk orientation ?
Ofcourse outside, i put my plane on the ground same way and start mag on board calibration. I see two mag turning green, when i move plane. And finally it says success.
I dont know, i think i dont have to turn my compass orientations, because they both are pointed up and when my plane is on the ground nose up, EKF is green. It goes red (Compass section) when i turn my plane like left side.
looks like you have the controls working backward…up is down but hard to tell for sure? all the square non-aerodynamic stuff can cause weird airflow from the leading edge back, normaly if the craft tilts left the elevon t/e should tilt to the right to bring the nose back to vertical
also, do you know where the center of gravity is? looks like it only hovering because of the pendulum effect of a very tail heavy setup …time to hit the books my friend
@tilt remark concerning CG is great and your battery on the tail probably contribute to bad stability. Try to move the CG around 25% from the leading edge. But the elevon are correcting in the right way, otherwise the wing would have flip in a fraction of a second. My experience…
Your compass setup seems to be OK. IF both pixhawk and external compass are pointing forward the external compass orientation is rotation_none. For compass calibration you can have a look at this video.
I did the calibration and compass and GPS works fine, checked that. That is good
Now i add one video, my succesful flight, only up, hoovering and down. Used only Qstabilise. No crash at all, finally.
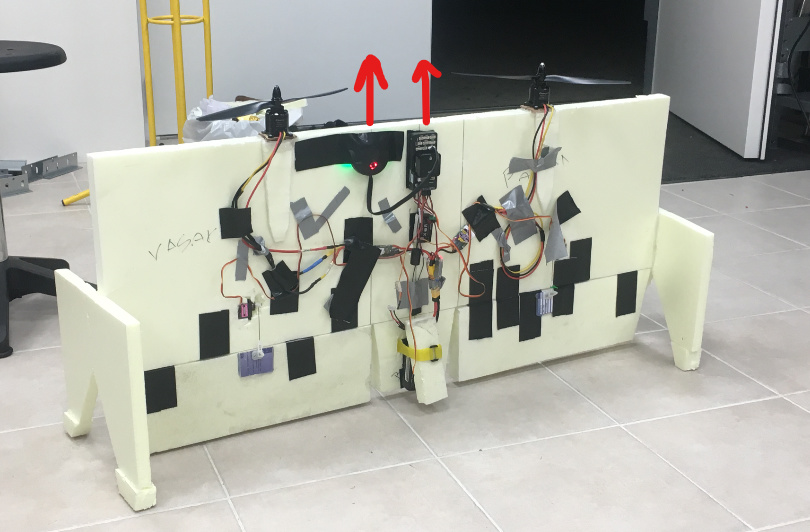
You all can see my safety wires also, if something is going wrong i pull the string and my plane doesn’t fall down and don’t break. And it did, because next time after a succesful flight i tried to myself to unstabilise, like pushed stick away and then back and so on, and yeah, it went crazy again and almost crashed, but thanks to my safety choords, plane was okey
But interesting is that when i did again my plane was crazy the second it raise from ground?! Like what?, i didn’t change anything, i also took of battery and put it back, GPS compass is correct but the second it raise it goes crazy I really don’t know why, mystery. Like in video you can see, it will fly but then I dont know. All the components also were in place and didn’t move at all. It acts like in video i added post nr:1087
Can someone give me info
My first log (Successful flight, that one what you can see in video)
Second flight, at the beginning aslo succesful but then i tried to unstabilise it with my joystics then went crazy
Third flight when plane was crazy at the first second it did raise.
I have to arm my plane also, otherwize it wont start
Congratulation you made some progress. Do you make your tests with a laptop connected by means of a 3DR radio ? If something goes wrong the pixhawk will send a warning to your ground station. This is the best way to analyse what the problem is.
To speak again about CG question raised by tilt, you have to consider that an aircraft, when submitted to a force momentum, rotates around its CG. In VTOL mode Its means that the CG should be far enough from elevon (maybe not too far !!) in order to increase the momentum. In fixed wing mode, there is an other requirement as the CG must be in front of the neutral point.
I can not look at your log for the moment.
Right now i don’t have my laptop connected, doesn’t have that long wire. But it is like original flight, with my remote control.
today i will go again to test my plane so your suggestion is, i have to raise my battery and put it to my CG line? Right now yeah i have battery at the bottom of plane?
Also do you have any ides why it went crazy? I mean just the second time, i didn’t get any flight at all, at the first second it went crazy Does it save some data and use it again and again or smth?
I really hope losawing you have a time to check my logs, that would be very useful to my school project

 Like always, leave all fast things to the end
Like always, leave all fast things to the end