Intresting. I Also building tailsitter and now i have RF8 and flight axis, but if i start SITL in mission planner, my throttle goes to minimum. I try to raise it but nothing happens, and when i look my joystick in screen i also see it moes only right/left, but not up. I calibrate and did everything. still no idea. If i end Flight axis and play just for fun, then it works perfectly I took random plane with fixed wing fimware.
Does everyone have this problem also?
@losawing Oh, sorry, I was a bit confused. The reduction with lean angle is in that branch too. It begins to take effect at roll > 30 degrees and pitch > transition_angle (which is one of the tailsitter parameters).
I had a successful test of that in QSTABILIZE mode with about 16kph wind last weekend, but destroyed the aircraft on the next flight due to pilot error.
The test seemed to indicate good performance when pitched forward up to 60 degrees (tailsit_angle was set to 45). But I didn’t test high speed lateral flight (roll > 30 deg); my plane had too strong a tendency to weather-vane.
I can do everything, but when comes the point: on the Full Parameter List or Tree screens, on the right-side select realflight-quad and press load parameters
I cant find to load Real flight-quad parameters anywhere. Thats why i suppose it doesnt work?
On right stick, everything is okey, all things are moving on plane aslo.
But left stick, it stucks in down positiion. I can move left or right, then plane details moves, but when i pust throttle to up, it doesnt move at all in simulator?
What should i do?
Is there some way to download already final firmware to my tailsitter.
I changed parameters, downloaded CAT model, but i can fly in fixed mode but whenever i change it to hoover mode, it starts shaking and drops down? I have my own build fixed wing 2 engine plane, then what supposed to be my first step to enable to fly with this? I heve PX4, do i install latest arduplane firmware and change like you said:
You will need to set:
Q_ENABLE=1
Q_FRAME_CLASS=10
For initial testing I’d also recommend setting:
Q_ASSIST_SPEED=0
Currently when you calibrate the accelerometers you will need to have the plane level in fixed-wing flight (ie. nose forward). Later we will need to add support for calibrating with the nose up, which would be more natural.
For servo setup, follow the fixed wing setup documentation for an elevon plane. You will also need to setup separate throttle outputs for left and right throttle. If you have left throttle on channel 3 and right throttle on channel 4 then you would use:
SERVO3_FUNCTION=73
SERVO4_FUNCTION=74
And then what? I’v readed a many forums but there are final products, not step by step for dummies like me
That plane doesn’t look like it will have a lot of airflow from the motors over the control surfaces. That is really important in a tailsitter. Without a lot of prop-wash over the control surfaces it can’t fly.
I begun to test Q_hover.
No problem so far, it seems your code is applicable to belly sittter but the pumping is still strong at low throttle. how shall I understand your sentence: Regarding my change to the speed_scaling, all I did was force the scale to 1 with the throttle at zero (instead of 5). The max is still 5 in my branch
Is this scaling still active when throttle is above 0 with a max of 5 ?
Just to check I did not make mistake while cloning the branch: the software version I see in MP is 3.8.2 dev
Regards
Pierre
I found also that the weather-vanning tendency and instability in the yaw axis with wind gust is the major concern with tailsitter. To mitigate the problem I have increased q_a_rate_yaw_I to 1 and q_a_rate_yaw_Imax to 4. I have q_a_rate_yaw_p pretty high also. With these values I have got an acceptable behaviour and found no collateral effect. Maybe, such high yaw_I value can be detrimental for pitch so be careful when your model will be rebuilt.
regards,
pierre
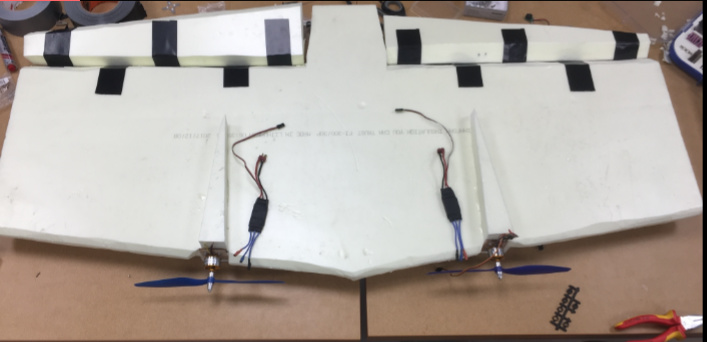
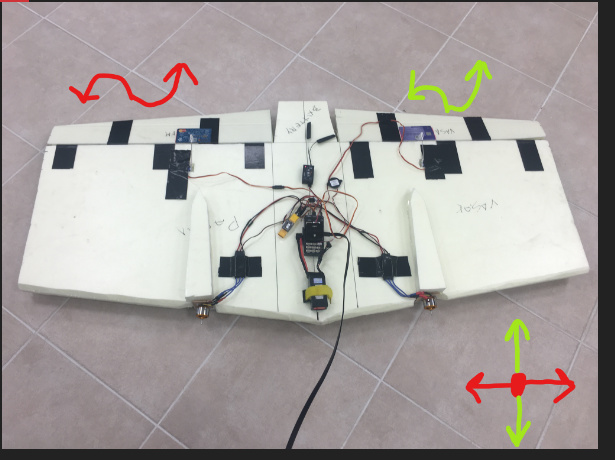
Hi everyone, I’m somewhat new here but have read through just about this whole thread so I think I’m fairly up to speed with it all. I’ve got a dual-motor tiltrotor flying wing that I’m trying to get working, but I’m encountering a few issues:
I can’t manage to get the control surfaces to move in the correct directions in both hover and forward flight modes. If I set it up to move and compensate in the correct direction in forward flight, it won’t be correct in hover (and vice-versa). I’ve been changing these settings with SERVOn_REVERSED, SERVOn_FUNCTION and RCn_REVERSED. (Also, not sure if this is relevant but when I calibrate my DX9 in QGroundControl the yaw and aileron movement is correct during calibration, but once calibrated they show as reversed i.e. left aileron shows right movement on the ball in radio setup).
When the wing is sitting on its belly in hover mode, and when I simulate it tilting upwards as it would takeoff, the tilt servos oscillate a lot. I’ve tried turning down the P and D gains for both Q_A_RAT_YAW (ROLL AND PITCH), as well as the regular xxx2SRV gains but the sporadic oscillations continue (possibly a hardware issue?).
The way you try to reverse servo direction is the right one. I think you have something wrong with some parameters or calibration or hardware installation. To start from the beginning:
did you set q_frame_class to 10
is your pixfalcon facing forward and ahrs_orientation set to 0
When you move your aircraft and look at the HUD in QGC,is the horizon move in the right direction in both hover and forward flight.
I have the same issue (look at the third video of post 1040). Setting all I and D gains to 0 does not stop the oscillation. The only way I found to avoid the oscillation is to switch from fbwa to q_stabilize , raise the throttle until propellers spin, cut throttle, switch to q_hover and take off. I recommend not to use q_stabize to fly and to set q_velz_max to 100
I’v done some work and i have one major problem. I downloaded latest ardupilot firmware, activated Q_enable and did some changes like said in posts. Motors works fine, but my ailerons works funny. When i use my right joystick, when i push forward my right aileron goes up and when i pull towards me it goes down. When i move joystic left my left aileron goes up and when i pull joystick to right my aileron goes down? I tried to change parameters, but didnt know what is problem? Can anyone help?
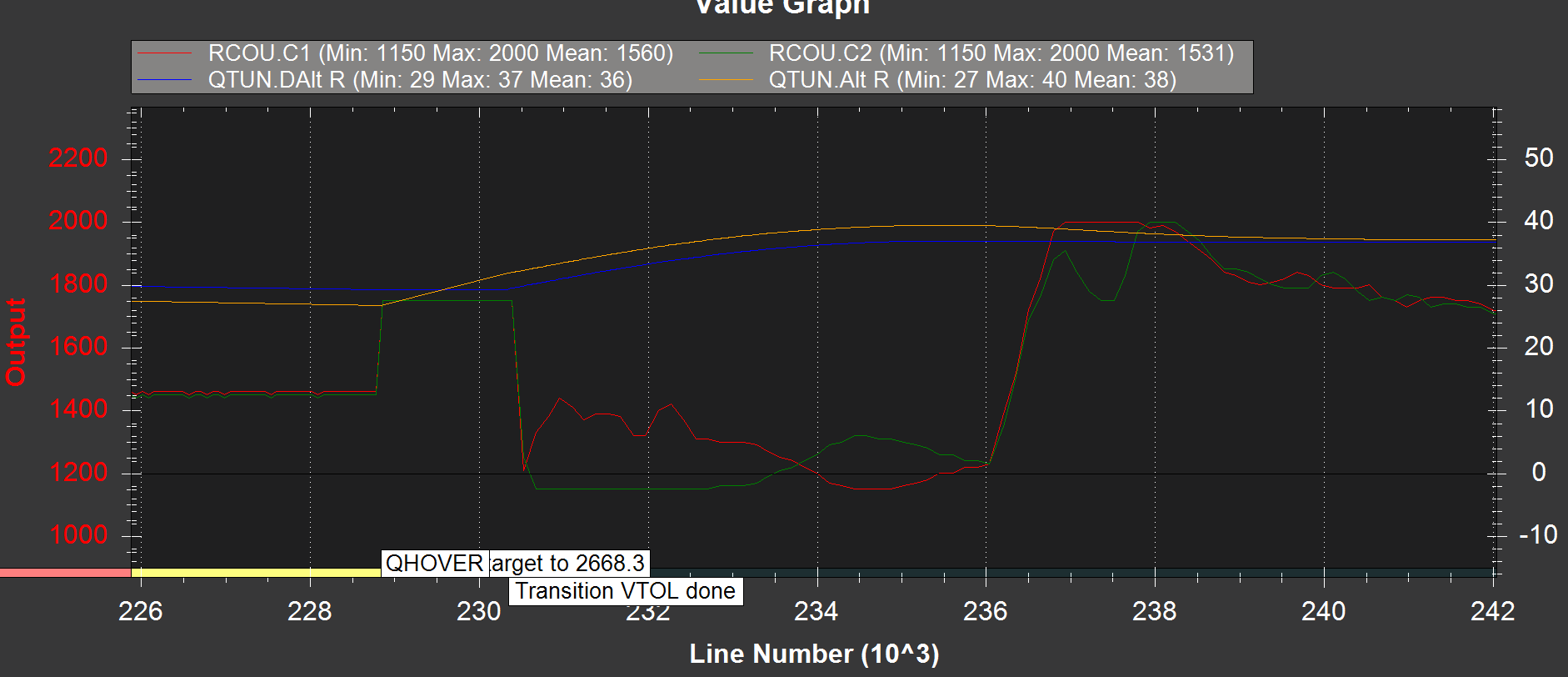
Hi guys, I have a question regarding similar problem, and it is back transition from FBWA to QHOVER, during this transition there is 5s throttle drop which cause altitude drop followed by quick motors action to 100% throttle. Please check the following log:
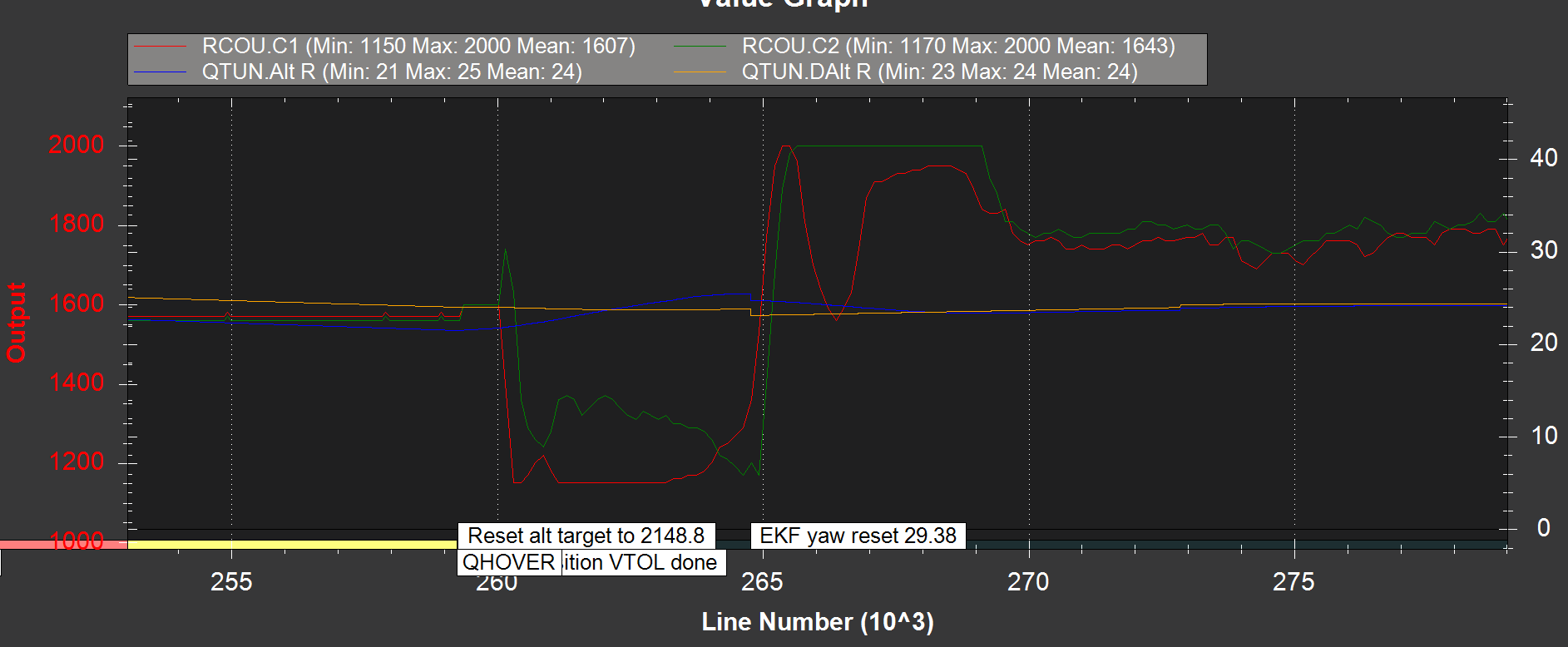
Based on this picture I thought that problem could be in too high Q_M_THST_HOVER which can cause that QTUN.Alt is after transition above QTUN.DAlt. But I tried to decrease this constant under the real hovering limit, but situation was still same:
Does anybody know what is reason of this 5s drop? Or how to remove it and make the transition more smoother ? I tried to play with all parameters regarding transition without any improvement.
I also checked the code and force throttle_wait = false; within QuadPlane::init_hover() method also without any change;
go to mission planner/initial setup/mandatory hardware/servo output
if your left elevon is linked to output 1 of your pixhawk, servo1_function should be declared as elevon_left (77), the same process for right elevon . Once the elevon mixing is working, you must use the reverse function to get your control surface to move in the right direction. An other thing that may be important is your radio setup. I use a basic 5 channel setup with AETR output.
I believe the drop is needed in order to slower the wing and get 0 vertical speed. I think the second plateau is driven by q_m_spin_min. I have this parameter set to 0.35 and I think it is important to set this parameter high enough to get the right amount of thrust to allow the wing to go from Q_talisit_angle to vertical. Too low, the wing will probably just stall and too high it will never stop. This is just a supposition as I am very happy with my setting and don’t want to test hazardous configuration. If I am right, I can see from your log that you have set q_m_spin_min around 0.2
The first plateau may correspond to the time needed to go from horizontal to q_tailsit_angle and is driven by q_m_thst_hover
 I took random plane with fixed wing fimware.
I took random plane with fixed wing fimware.
 It was not armed
It was not armed