
Nice built and beautiful success. I think also that plank wing with low aspect ratio is the way to go. Could you share more details about tilt mechanism, CG position, airfoil, parameters…
Sir, as per your requested here is my log file.
Today, 2nd test flight failed. Don’t know what happen. Check servo everything ok.
1st transition min 38sec ok
2nd transition min 3.04 ok
3rd transition min 3.44 ok
4th transition min 6.50 not ok

Link for the log.
Tridge told us, when the Wing lean backwards (e.g. to hold the position against the wind) he will transit
backwards. Therefore make the transition against the wind.
So i leans already on the correct side when holding position.
By the way. Fix your camera on the sunshield of your cap. And it will follow automatically the Wing.
See the result of my 45 videos on YT.
I have run an auto log analysis on your log and the answer is

there is a fail:
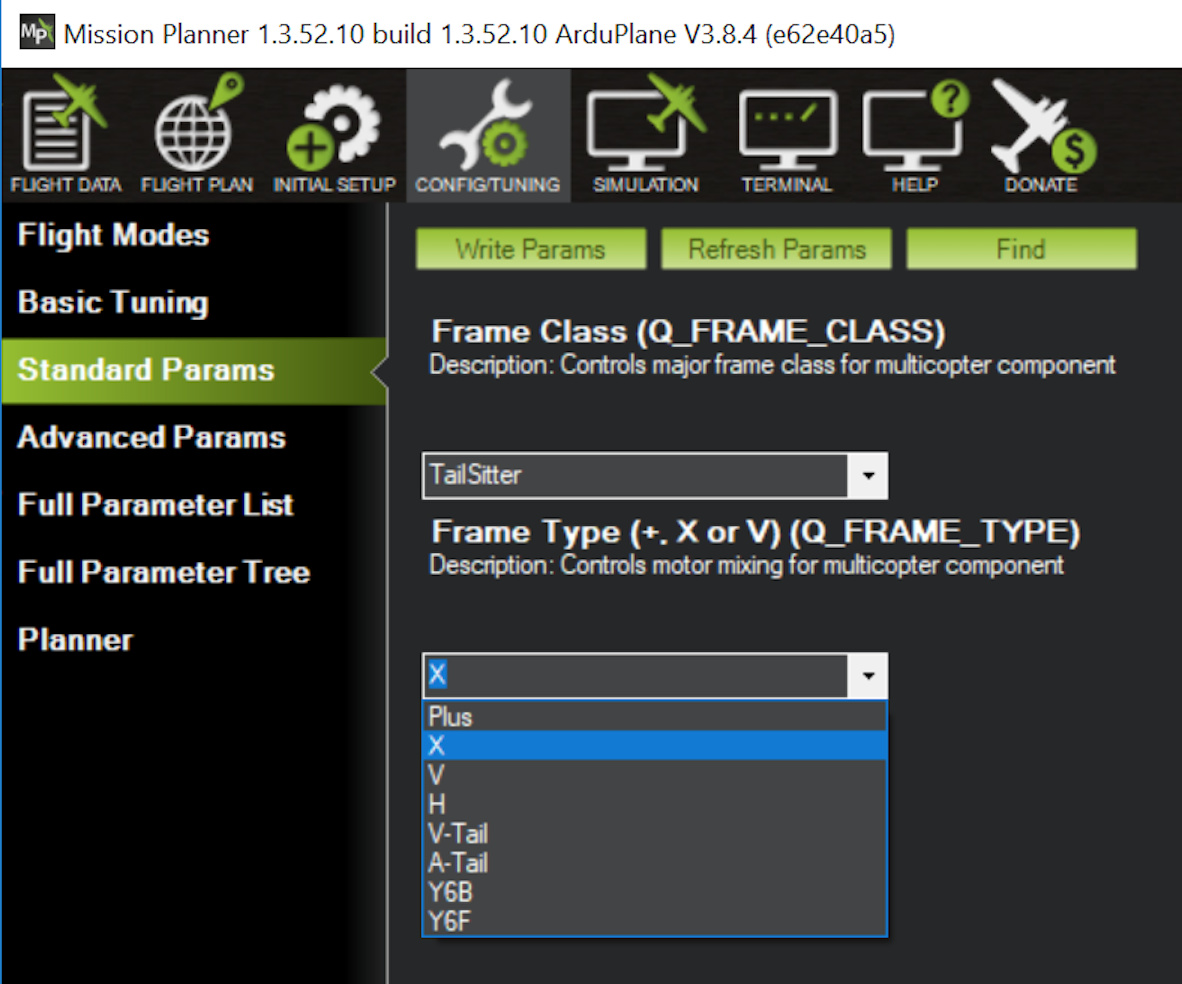
IMU Mismatch = FAIL - Check vibration or accelerometer calibration


this parameter is not applicable to tail sitter
The threat is almost 1000 post so almost impossible to read but the an efficient way is to use the search tool.
Also you can download the parameter list posted by majelan post 969. His parameters are almost defaults and works pretty good. The parameter list contains also calibration data, so dont paste them but you can use the compare tool available at full parameter list page.
Thank you for the response Losawing ~ it is a big thread with a lot of info. I appreciate your help !
First hovering tests in “Q-Stabilize” flight mode with my “Explora” for checking the copter tuning, tomorrow i try all the transitions…
Hello I am playing with specific tailsitter frame with three motors(two motors as usual on the wing and additional one placed on the bottom (as standard delta wing plane with one motor)) my idea is take of in as standard VTOL tailsitter usinq twin motors on the wing, perform transition and activate the third motor and fly in the horizontal mode as standard delta wing plane with one motor. I have checked the code, but I am confused from motor configuration for tailsitter mode. Is there some way, how to change motor configuration for horizontal flight and use additional motor instead of twin tailsitter motors?
The main problem is to stop left and right motors once the transition from Q_hover to FBWA will be done. The code does not support this feature as both flight mode use throttle input to control left and right motors. When flying Q_hover the throttle is mixed with roll to ensure stability while in fbwa the throttle is mixed with yaw to ensure yaw control. This is the only difference.
I think it is possible to add a third motor provided SERVO_XX it is linked to is set to 70 (throttle). But this third motor will spin whatever the flight mode.
Not easy to explain, I hope it is clear.
Thank you for your help, I got your point. Third motor mapped to 70 works as you said. Now I am trying to understand the code to be able to update it accordingly. Unfortunately this concept of tailsitter (based on quadplane) is not really crystal clear to me.
That’s interesting bzucak, I am working on a similar concept with a third motor. I think a switch to turn off the two motors used for vertical flight and turn on the motor for horizontal flight would be awesome. It could all happen automatically in the transition, but I think there would be advantages of manually controlling this additional transition. The idea I am looking at has the third motor in front (not a pusher). But I would think as far as programing, it would be the same. It appears this may be something we need Tridge’s expertise on…
Has anyone else had this problem?
Marco
Are you shure it was Q_Stabilize and not Q_Hover?
Because with Q_Hover it is normal while the wing is climbing higher with the speed as set after the transition.
I called it "Flameout"
Here with Q_Stabilize Transitions:
Check the tlog, “Q_Stabilize”…