Hi, James, looking to understand /visualize PID tuning more in depth as it relates to( TVBS) twin vector belly sitters and Ardupilot. But it looks like that will be interesting as well… Thanks
Sorry- misunderstood. I thought you wanted to build a balance bot, in order to visualise pids and tuning.
We should probably put together a video explaining the 20 or 30 tuneable params, as ArduPilot is a bit more sophisticated than a simple pid loop. There are a number of “what are pids” videos (https://youtu.be/0vqWyramGy8 for instance), but they only scratch the surface really.
love that video idea! lots of head scratching about those 20 or 30 params.
Or hundreds of testflights or Rig tests as actually for mine including hours of log analysing
to get this result ![]()

“Old” Transitions still risky, flower bed helpful for “autolanding”.
Log: https://drive.google.com/file/d/0Bxldq38bfbqHa25ja09jTXZ0MUE/view?usp=sharing
No more “Flameout” when FBWA to QSTABILIZE
David detected the reason for the Flameout: FBWA to QHOVER or QLOITER. Thank you.
Otto
1 Like
Hi Otto,
gratulations, first backtransition with somersault backward (at 06.40) 
Thanks for the extensive measurements and hints.
Rolf
-
CG at 1/3 root chord
-
Flaps angle 45°
-
Flaps width 1/3 root chord
-
stable hover at 30° pitch with almost no flap deflation
-
Backtransition fine when going to QStabi
@tridge maybe it would help to
- allow weathervaning to point a side in the wind
- make two parameters out of the angle limit for hover -> separate pitch and roll limit
LOG: https://www.dropbox.com/s/4cwr0qptrpdpp0n/00000010.BIN?dl=0
1 Like
Just some fun with transitions.
Reduction of Q_A_ACCEL_P_MAX from default 110 000 in steps of 10 000 down to 20 000 has no affect on the Transitions.(Visual and Log)
Just saw beta release of Plane 3.8.3 https://github.com/ArduPilot/ardupilot/blob/plane3.8/ArduPlane/release-notes.txt
I am not sure if anything matter for tailsitter?
the beta isn’t actually released yet - I’m doing some work on tailsitters today. I don’t know yet if I will have something good enough for release though.
I did manage to get the new tailsitter transition code done for the beta. It is going through travis CI testing now, and I expect to push it to the build server for beta1 release later today.
It should give much smoother tailsitter transitions, both for vectored and non-vectored tailsitters.
Cheers, Tridge
Hi Tridge,
Good news, thank you.
Are for this new Params to set or to modify other ones?
To which Mode do you recommend the BACK-Transition, (QSTABILIZE or QHOVER)?
Regards, Otto
It uses the existing parameters. The key one is Q_TAILSIT_ANGLE, but it will now also honour the rate limits on the fixed wing and multicopter controllers during both fwd and back transitions.
most of my testing was with QHOVER, but it should work with any VTOL mode (including in AUTO missions)
QLOITER is still not a great transition mode as it can try to fly back a bit, although it isn’t as bad as it was previosuly.
Thanks for the reply,
How about this?
After the command for QHOVER it made a short Jump upwards. Because of this, it is higher than
the set altitude for QHOVER and therefore the mots go to a minimum. (Flameout)
Due to this missing thrust it glides uncontrolled or starts to roll/yaw (spin) until it falls below the set altitude.
But then it is out of an controllable attitude.
As to see here at 2min13sec
Perhaps to set the altitude after the transition instead of at the time of switching?
Regards, Otto
that’s an interesting idea, thanks!
for 3.8.3beta1 I did reduce this effect a bit by setting the integrator in the Z controller, and forcing throttle to hover throttle during the start of the transition, but there is still a significant effect.
You can also try raising Q_M_SPIN_MIN to a throttle level at which is still retains some control. You’ll still be able to use a lower throttle in fixed wing mode, but that would prevent throttles with no control while hovering. Try 0.2 to 0.4.
the build server has now started on the 3.8.3beta1 build. It will take a couple of hours to complete
I’ll do a separate post with the list of changes since 3.8.2
Will the described “Pauls” controller be integrated too?
I assume this will solve the described overturn in liftoff also.
Regards, Otto
it will be in the future, but we didn’t manage to get it integrated in time for 3.8.3, sorry
How helpful you are Tridge Sir . . . . May Nature bless you all . . .
1 Like
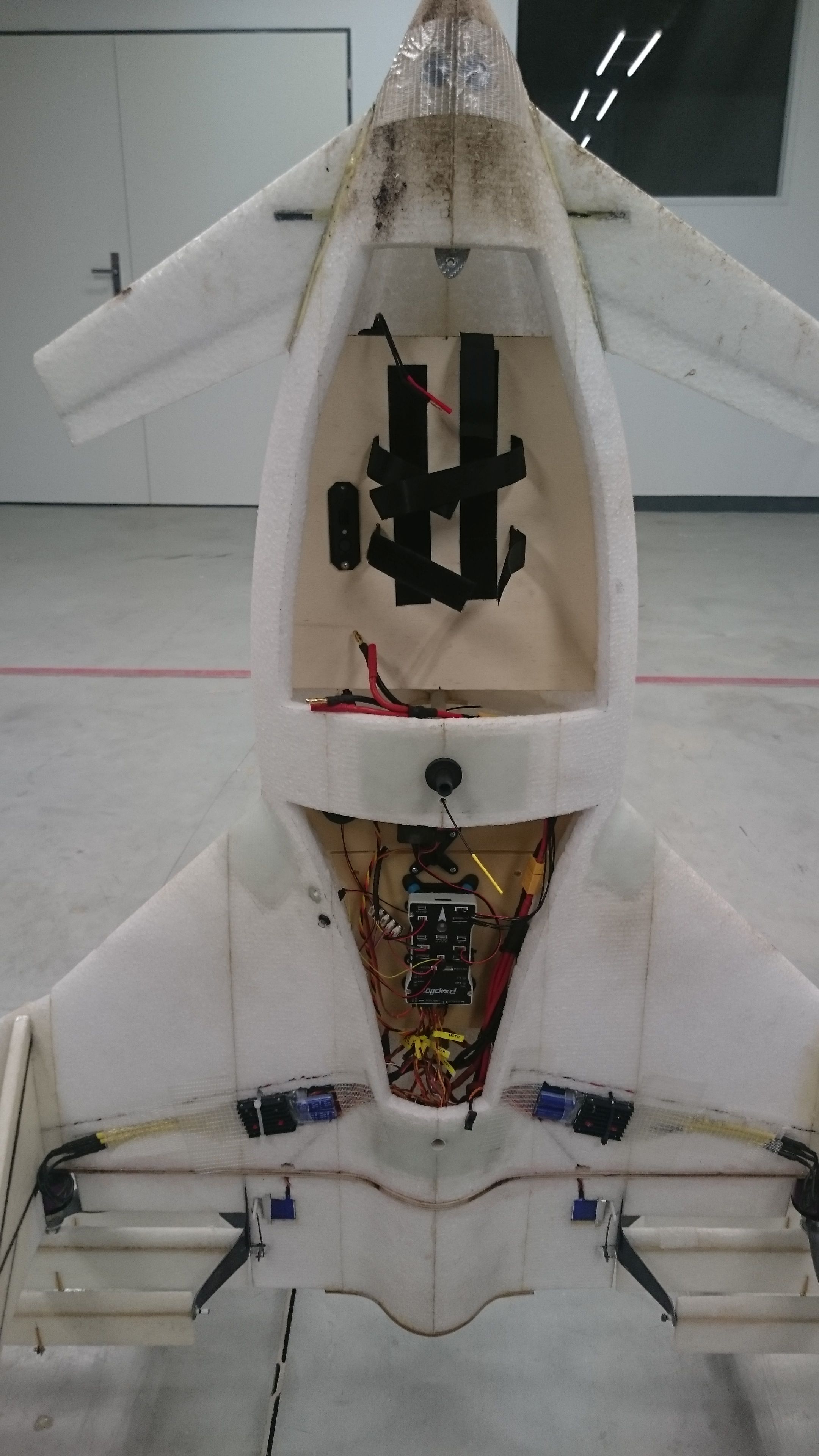
Hello everybody. I would like to share with you the build we have. It is supposed to be a commercial drone, but for starters we have a small model version as a proof-of-concept. Model version is running on PX4Pilot (clone of pixhawk) and ardupilot.
Our plane has elevons and ailerons. I am mixing elevons with ailerons, but I would like to decrase the elevon movement for the aileron (roll in fixed-wing configuration) input. For this purpose I wanted to use mixing_offset parameter, but it does not seem to work.
Any suggestions or ideas how to solve this issue? It is necessary for fixed wing flight.
Thanks for any help.
For better understanding, here is the picture of our plane: