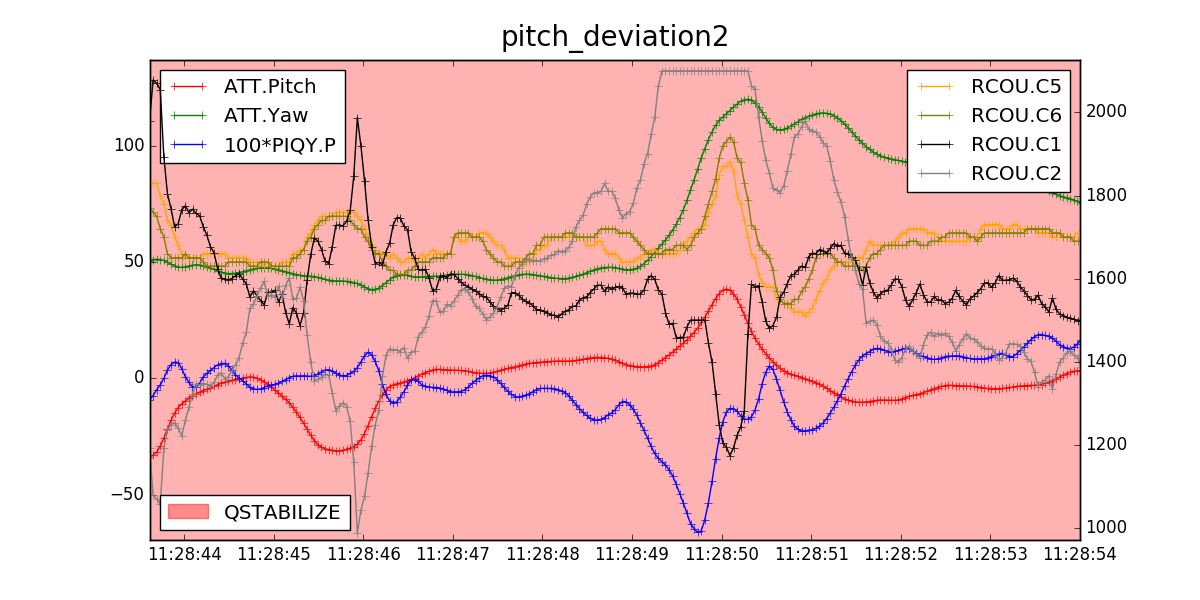
@tridge Here’s an interesting event: uncommanded pitch up of 40 degrees, to which I responded with a small throttle increase and a lot of down elevator. But it appears that motor current increases in proportion to pitch angle. Leonard’s patch isn’t in master yet, is it? In any case, the error was corrected within about 1 second. I’m guessing the deviation was caused by wind or turbulence, possibly causing a yaw demand which saturated the elevons.
quadplane inherits the hover throttle code from copter, but it doesn’t yet have automatic learning of the hover throttle. So the hover throttle setting in Q_M_THST_HOVER does work, but we need this function to make it learn:
it should be pretty easy to add to quadplane.
We’d need to make sure it only learns while in a steady hover. If we tried to learn in a transition or assisted flight we’d end up with some really wacky values.
that depends on your Z controller settings. Just raise Q_ACCEL_Z and Q_VELZ_MAX and it will jump pretty hard in QHOVER. Also set hover throttle correctly. Some vehicles will need 0.7 or 0.8.
it is used in quadplane, as it uses the same position and attitude controllers. Look for get_throttle_hover() in the code. It is used in many places, but the most important is this one:
@tridge Tried qstabilize mode at the field, but the wind was too high for the Stryker. Wasn’t able to command pitch greater than about 30 degrees, and the wind was carrying it away.
Which parameters determine the min/max pitch range? increasing LIM_PITCH_MIN/MAX seemed to have no effect.
Takeoff is at 16:20:29, flight lasts about 20 seconds with one uncommanded 360 degree (body-frame) roll.
I was quite pleased with the wind handling capability of the Convergence; takeoff and landing in hover mode required very little extra effort in the wind (avg. 12mph, gusts around 20mph). There is essentially no pitch change when heading directly upwind, motor tilt provides the necessary airspeed and wind penetration capability is quite high. Landing on any heading other than upwind would be difficult, though. So I think I’ll put a PixRacer in the Convergence before I build another tailsitter.
the limit in Q modes is the minimum of Q_ANGLE_MAX and LIM_PITCH_MIN/MAX
I see you pushed LIM_PITCH_MAX to 80 degrees. Might want to reduce that a bit [quote=“kd0aij, post:254, topic:15302”]
So I think I’ll put a PixRacer in the Convergence before I build another tailsitter.
[/quote]
great!
for those following along, Rick and I had great fun on a G+ hangout and we sorted out his issue. The problem was that he had loaded the parameters from the PixRacer into the Pixhawk, including the BRD_TYPE parameter. That caused BRD_TYPE to be set to 4, which caused the startup on the Pixhawk to fail.
do you also need it in hover?
If you only need it in forward flight, then with current code you’d need to just rely on the integrator fixing it in either hover or forward flight. Right now the elevon trim is the same in both. If you have a nice high I term it will learn it quite quickly, but that may not be good enough.
We could add a parameter for it. Maybe Q_TAILSIT_PTRIM ? That could be a -1 to 1 parameter for pitch trim in hover.
While working with @tilt today we found the change I made to allow elevons and motor tilt to operate while disarmed in Q modes didn’t work. I pushed a fix today. That should make it much easier to do pre-flight testing of control in Q modes.
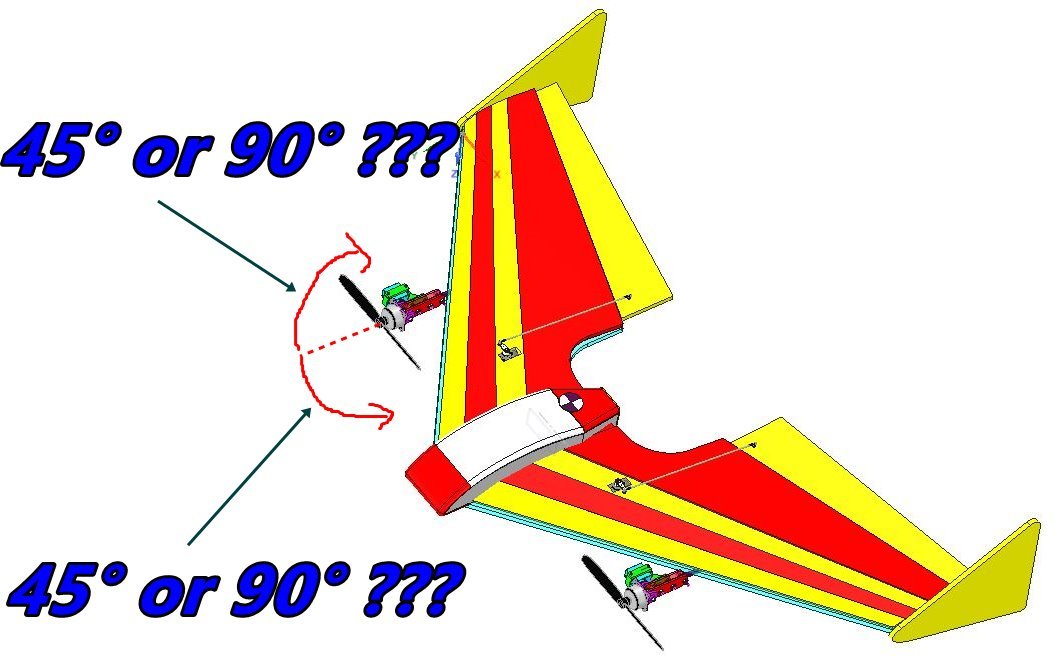
We plan to build a vectored thrust tailsitter. Some questions before the construction of the tilt mechanism: Which maximum angle is required for the tilt amechanism of the front motors ? Are 45 degrees in each direction enough ? Is an asymmetrical deflection possible ?
Hi Tridge,
“Mozart” now flies perfectly and I have only to do “routine work”.
That’s why I just for fun built a delta. Base of the Might Mini Arrow by E-Flite.
But no kit. The surface is identically constructed, the fuselage is somewhat more spacious.
The aircraft flies completely manually controlled very well. Now we want to convert the aircraft to a tailsitter. I have read many pages here, but I still have a few questions:
What configuration is better for this delta? Vectored or not?
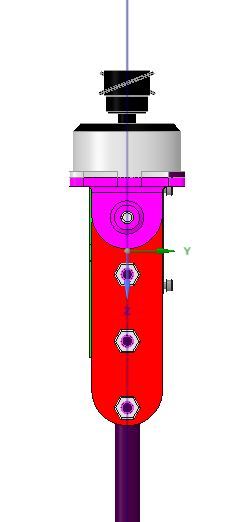
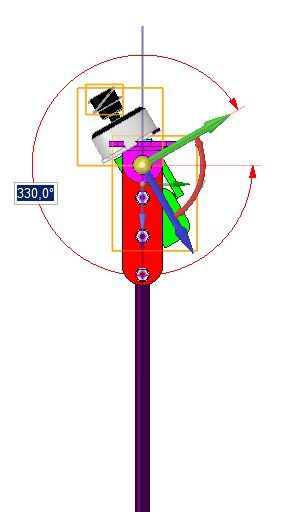
Are the 120 degrees of a servo for the vectored tailsitter ? - 0-90 or + 30 / -30 degrees for oscillation-
How does the motor position relative to the center of gravity (in the longitudinal axis) affect the stability behavior?
Regards
Walter
@ Rolf,
sorry, but we can make also +30/-30 degrees for oszillate and 90 degrees for horizontal start.
Because the servo has 120 degrees max. (If Tridge confirms my question)
@lorbass Looking at my log from yesterday, with Q_M_THST_HOVER set to 0.7, it seems that hover is still at about 75% throttle. @tridge says the parameter is implemented, so perhaps I don’t understand what it’s supposed to do, or maybe it needed a reboot. I changed that parameter at the field, and may not have rebooted afterward.