Only experience is with those two (actually another but its much like the S800)…the s800 is closer to the root, but a little closer to CG than the C1 chaser so cant really tell which has the bigger moment…the C1 chaser definitely has a longer suspended arm from motor to CG…
The key thing about the tilts from far from the GC is you get the same pitch moment with much less angle. This means your servos have to move less far so effectively become ‘faster’. Any vectoring at all gives you so much more authority than control surfaces the maximum possible pitching moment is not so important.
This is the reason this works so well, because its not a flying wing the tilts are a huge distance in front of the CG.
Sooo, as it turns out, master is kinda “broken” for vectored tailsitters due to a tilt rotor gain scaling error…your PR that corrects that did the trick and got the behavior usable again…thanks!..I have to retune everything, but pitch defaults allowed the TVBS to actually execute a VTOL->FW->VTOL Land mission without control ever being an issue…since it was okay in Stable, the C1 Chaser flew well since it was using that, but for the last couple of months I had been using master on the S-800 with the incorrect gain scaling for tilt…was going insane
1 Like
Hello! I am designing a non-vector engine tailsiter for survey use, I am going to reuse two engines from a dji s800 crashed with 6s batteries, I estimate that the wing span will be close to 1.5m, with a gondola capable of storing electronics and a camera Do you have any recommendations regarding the location of the engines? distance to each other or distance to the leading edge?
Greetings from Argentina!
From post 1453 you can see construction details and videos of my non vectored tailsitter. I cant say much more.
Hope to see your plane soon.
For several days I have been testing and tuning Q_loiter and auto transition to VTOL with my blue wing TVBS. I use plane 4.0.7
I am now very happy with Q_loiter and transition from fbwa to Q_loiter are always very good. I made plenty of them and they are always OK, this is how they look.
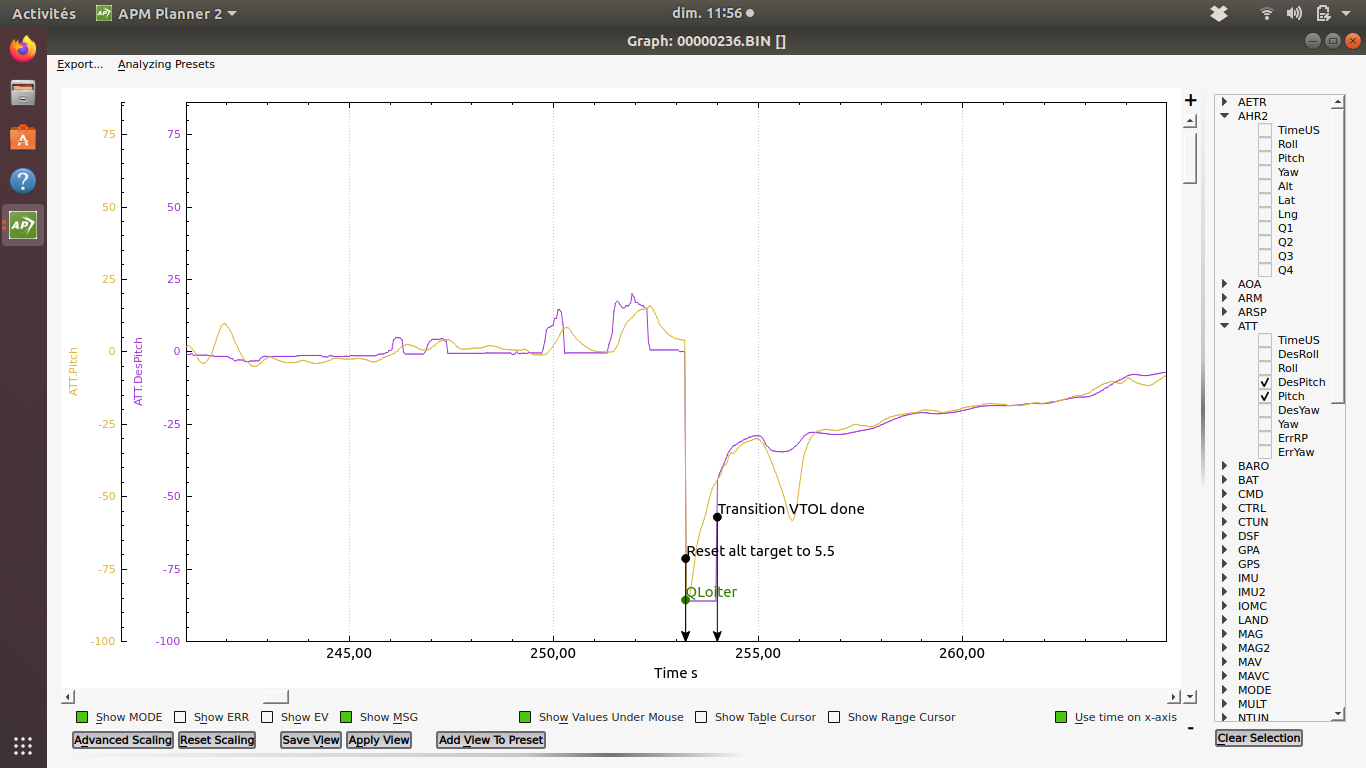
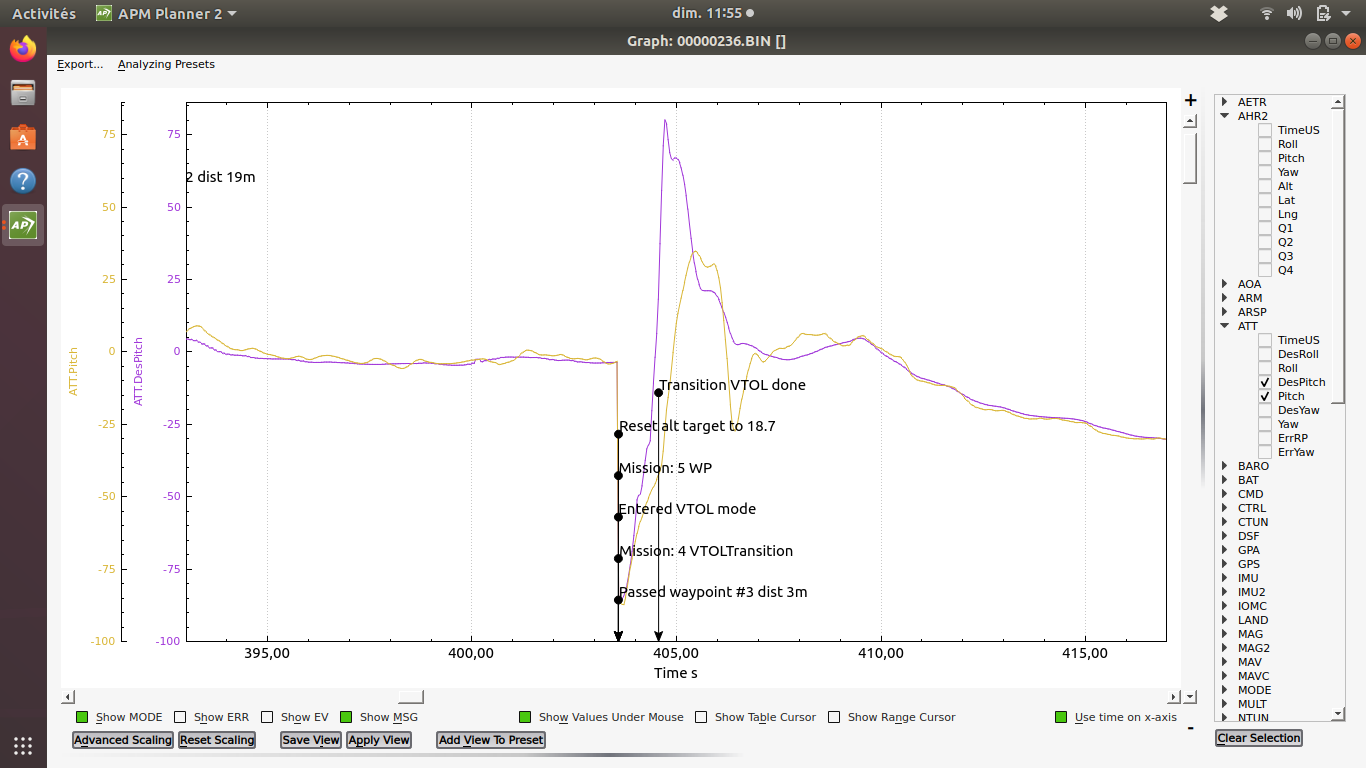
Auto transition do not behave the same, Sometime they are OK but sometime they produce scary maneuver and the wing does not crash because the vectoring thrust is very efficient to recover. During the auto transition it seems that sometime the wing want to lean on its back. Looking at the log the desired pitch looks bad.
Probably worth jumping on master (4.1.dev) quite a few improvements to transitions and logging.
With master 4.1, which of the gains is advisable? I will try to test Disk Gain when the weather improves. I don’t know if it will be the best option. I will need your advice before switching to FBWA ![]()
Thanks for the suggestion,
I have uploaded ‘latest’ 4.1.0 firmware_version_type_dev
Q_tailsit_thscmx parameter is gone.
I have instead the q_tailsit_gscmsk parameter which default value is =2 (disk loading) but q_tailsit_dskld parameter description tell us the mask value should be set to 4. Could you check ?
I would like to start with my former parameters setup so I suppose I have to set q_tailsit_gscmsk=0 and q_tailsit_gscmax = q_tailsit_gscmin = 1 (I had q_tailsit_thscmx=1)
Is that true ?
The wing is now blowing with gale force on the Biscay bay and is expected to blow several days… It is time for windsurfing 
Q_TAILSIT_THSCMX is now Q_TAILSIT_GSCMAX
Q_TAILSIT_GSCMSK should default to only throttle (1). Although with GSCMAX and GSCMIN = 1 your not actually doing any scaling at all.
Ok, I confused the bit value and the parameter value.
Throttle is bit 0, parameter =1
Att_throttle is bit 1, parameter = 2
disk loading is bit 2, parameter = 4
If Q_TAILSIT_GSCMSK = 4 > Disk Gain
Are the default values for Q_TAILSIT_GSCMAX and Q_TAILSIT_GSCMIN, goods for the first test?
I notice that Q_TAILSIT_THSCMX remains at 4.1. In my case it has dragged the value = 1 that it had in the backup 4.0.7
And Q_TAILSIT_GSCMAX by default = 2
Then, which of them prevails?
My method is to tune gains to their max value at pitch angle less than 40° with no gain scaling and only after to test step by step pitch angle up to 80° and gain scaling. I would begin with gscmin=1 and reduce it by 0.2 step by step.
With “no gain scaling”,
Do you mean adjust the gains manually with FW lower than 4.1, and then use the gain scaling (with Q_TAILSIT_GSCMSK = 1,2,3 or 4) with FW 4.1?
I have too one question about Disk Load calculation:
Talisitter weight: 2750 gr
Propeller: 14x8
Propeller wash on aileron surface= 67.5%
Radius = 7 "= 0.1778m
Area = 0.0992 m2
2 propellers = 0.1985 m2
Kg / m2 = 13.8539
13,8539 x 67.5 / 100 = 9,35
>>> Q_TAILSIT_DISKLD = 9.35
it is right?
1 Like
yep, calculation looks OK, its not hard and fast you might find better results a bit higher or lower than calculated.
OK thanks; I’ll remember it on maiden day
But I can see both parameters with 4.1 in master you posted for Matek F765, ![]()
1 Like
Well Pierre, this video does not have much to envy …
https://www.youtube.com/watch?v=lq4YoWmHiEY&feature=youtu.be

Fairly sure AP could cope with all those failures on a well setup vehicle. Was hoping for a one motor hover