So far so good. You cant really analyze a Tune from the Auto Tune log itself but the Roll PID’s look to be going in the right direction. The Notch Filter is working really well.
Pitch I suppose you meant as both Pitch and Roll are Auto Tuned in this log.
Set these now:
PSC_ACCZ_I to 2X MOT_THST_HOVER
PSC_ACCZ_P to MOT_THST_HOVER
ATC_THR_MIX_MAN, .5
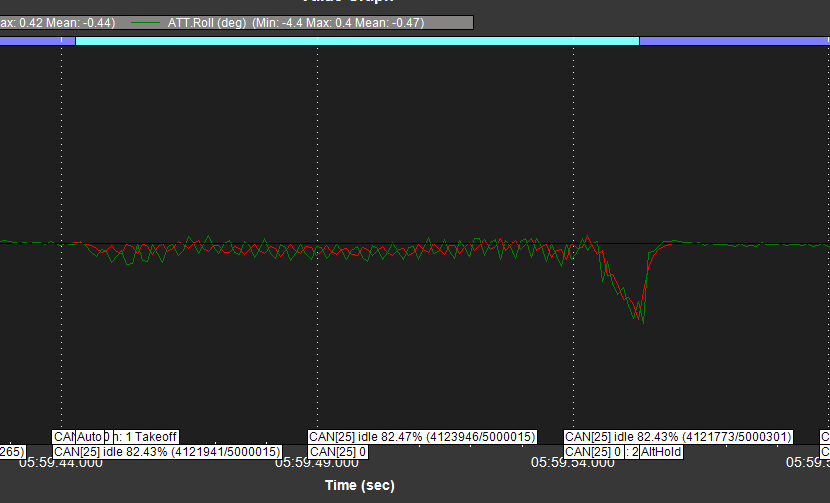
Seems stable from ATT DesRoll/Roll and same on pitch ,
But difference between RATE.ROut and POut is on the edge , more than 0.1.
Kindly share your opinion .
I will try with changes you suggested and post the log soon .
Hello gentlemen, coincidentally I am having the same exact problem. The exact frame and flight controller ( tdrone m690 and cube orange but px4 firmware). My issue is also the same. There is a oscillations on the roll and pitch axis. Even when testing indoor hovering it twitches on these two axis. What was your final result after tuning it? Did you solved your problem? I would be pleased to hear from you