I get it: not the first time I’ve had this discussion ![]() I think it’s time to shift the thinking from focusing on the “why not’s” to “how do we fix this”. With parameters, it’s easy enough to use an existing parameter (hover throttle, rc ranges, a bunch of options) as a marker for indicating that a vehicle has been configured previously, and then not touch the servo functions in an update.
I think it’s time to shift the thinking from focusing on the “why not’s” to “how do we fix this”. With parameters, it’s easy enough to use an existing parameter (hover throttle, rc ranges, a bunch of options) as a marker for indicating that a vehicle has been configured previously, and then not touch the servo functions in an update.
What would you propose?
-
Just change the default to CW X, its more intuitive.
-
Remove all the current frame types and start over. For example X, Betaflight X, DJI X and CW X are all the same motor layout with different ordering. So we could remove all of those and just have X. Like wise Betaflight X reversed is the same as H. So for quad we could go from 12 frame types to 8 (X, H, +, + rev, V, V tail, A tail and Y4A). The param conversion here would be more complex as we would have to shuffle the output functions to get the new frames to come out the same as the old ones. This would also mean its harder to config if you are using a config where one of the old types was correct. For example coming from Betaflight you have motors 1,2,3,4 and use Betaflight X and your done. The new scheme would be frame type X and you would have to work out the motor ordering of 2,1,3,4.
-
something else
Ultimately I think wherever we end up a interactive GCS helper would be useful even if all the frame types are standardised. The tool works just the same with the none-standard frame types so there is no need to remove them. But once we have the tool we can remove the none standard ones from the main wiki page and direct users to frame class X and use the tool. Once we have the tool users don’t need to interact with the numbering/ordering directly anymore so it doesn’t mater that it is confusing.
The other firmware does have auto ordering with QGC. You have to manually enter your motor mixer weights tho, so I think we still have the edge.
I think it’ll need to be a two step process: first, get motor test and default motor order to match, and then get a ui and dynamic allocation implemented.
To me it makes sense for the default to match the most likely configuration, which is a 4-in-1 esc using the BF order, but I could live with CW-X.
1 Like
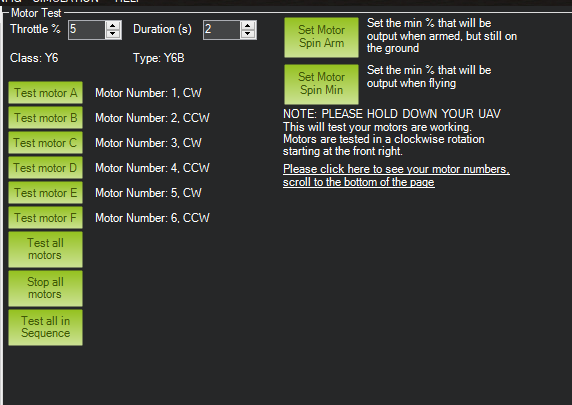
For frame like Y6B absolutely not, doc present numbers and MP shows magic letters
Try the beta:
1 Like