You really need to start your own thread - this is not simply a compass issue for Devs to solve.
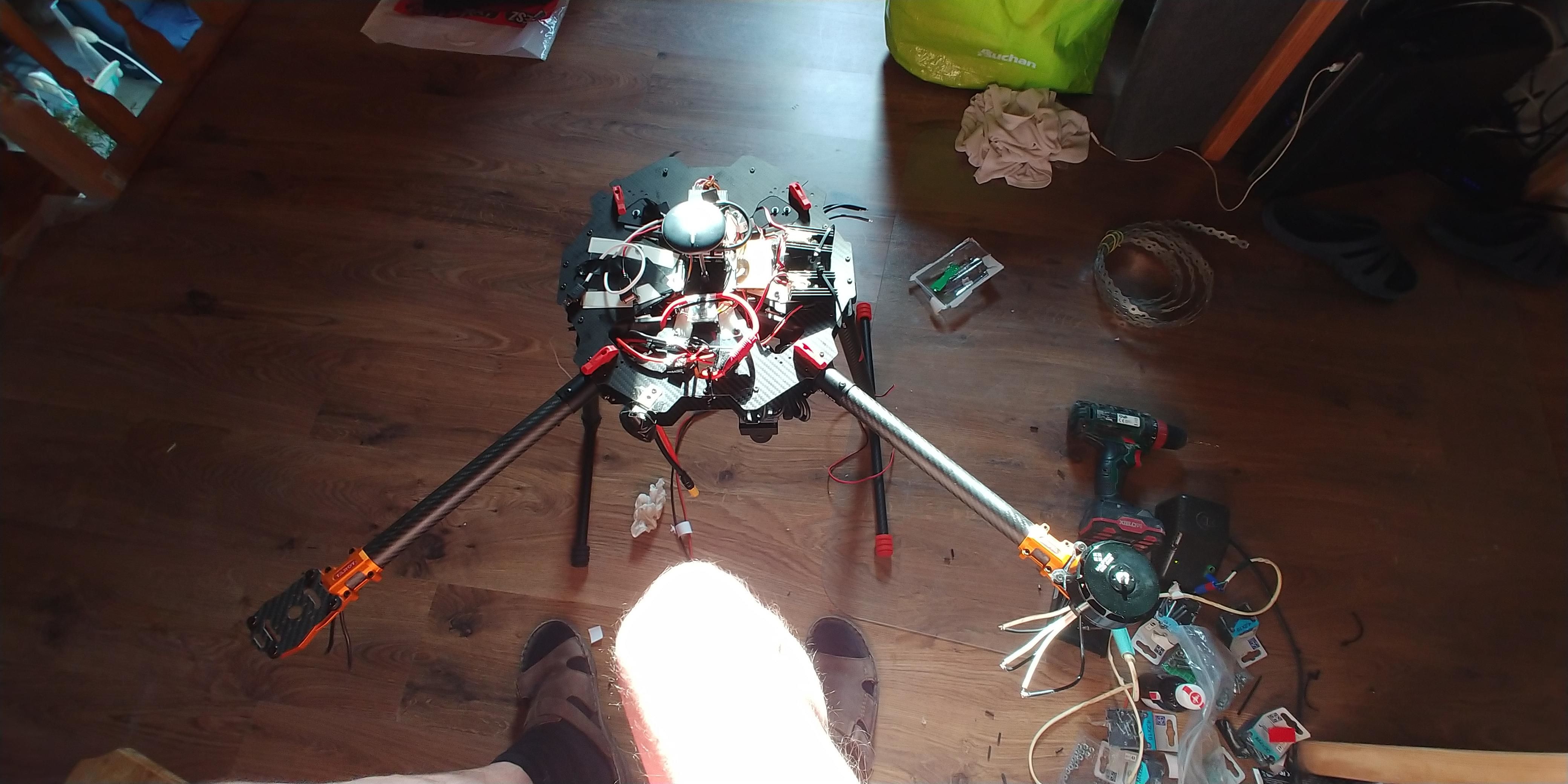
Some tests have shown that anti-vibration mounts for motors actually makes vibrations worse. It allows the motors to move around more than they should. This may not be true of all motors or antivibration mounts. Be prepared to test without those fitted.
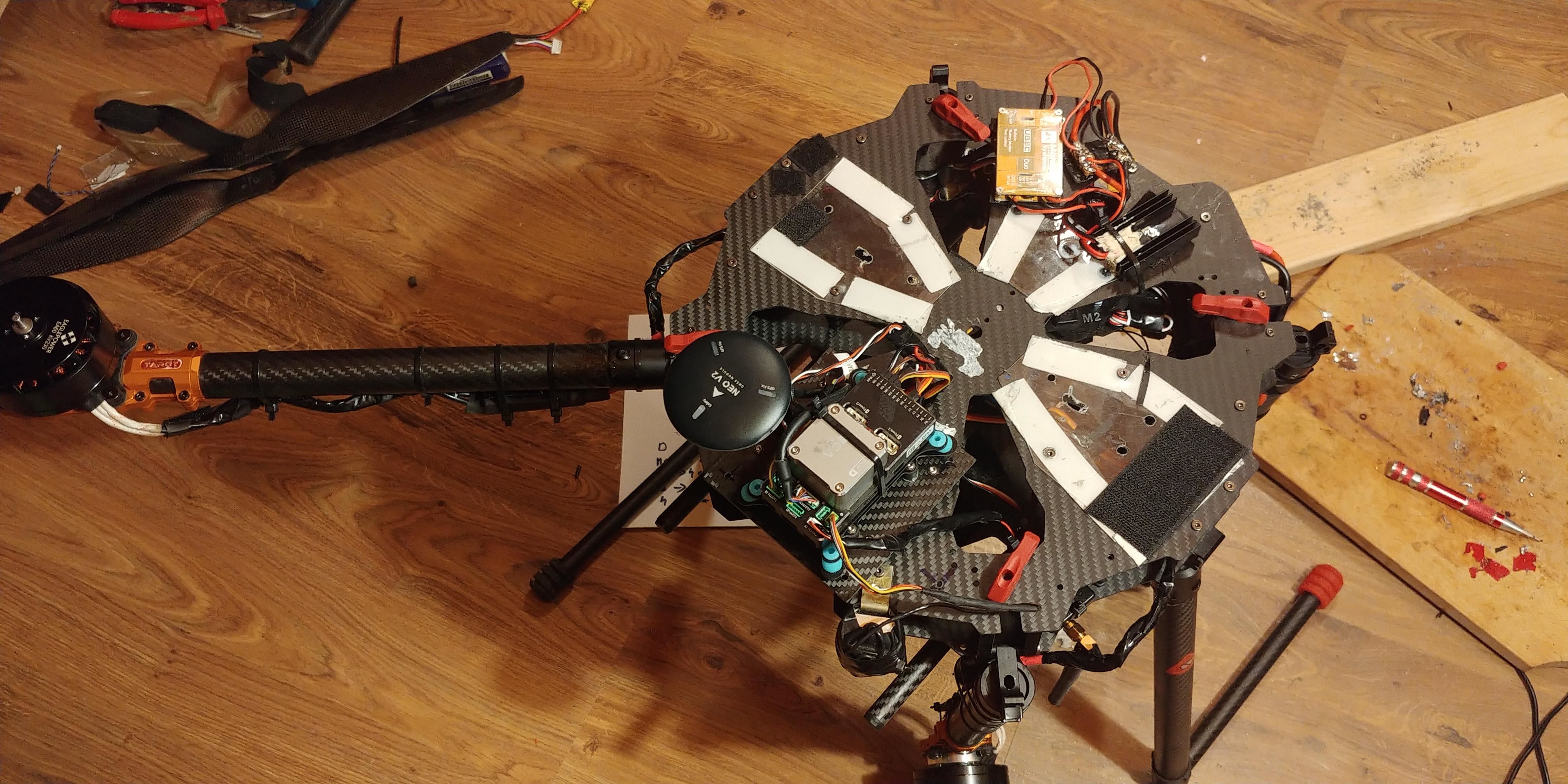
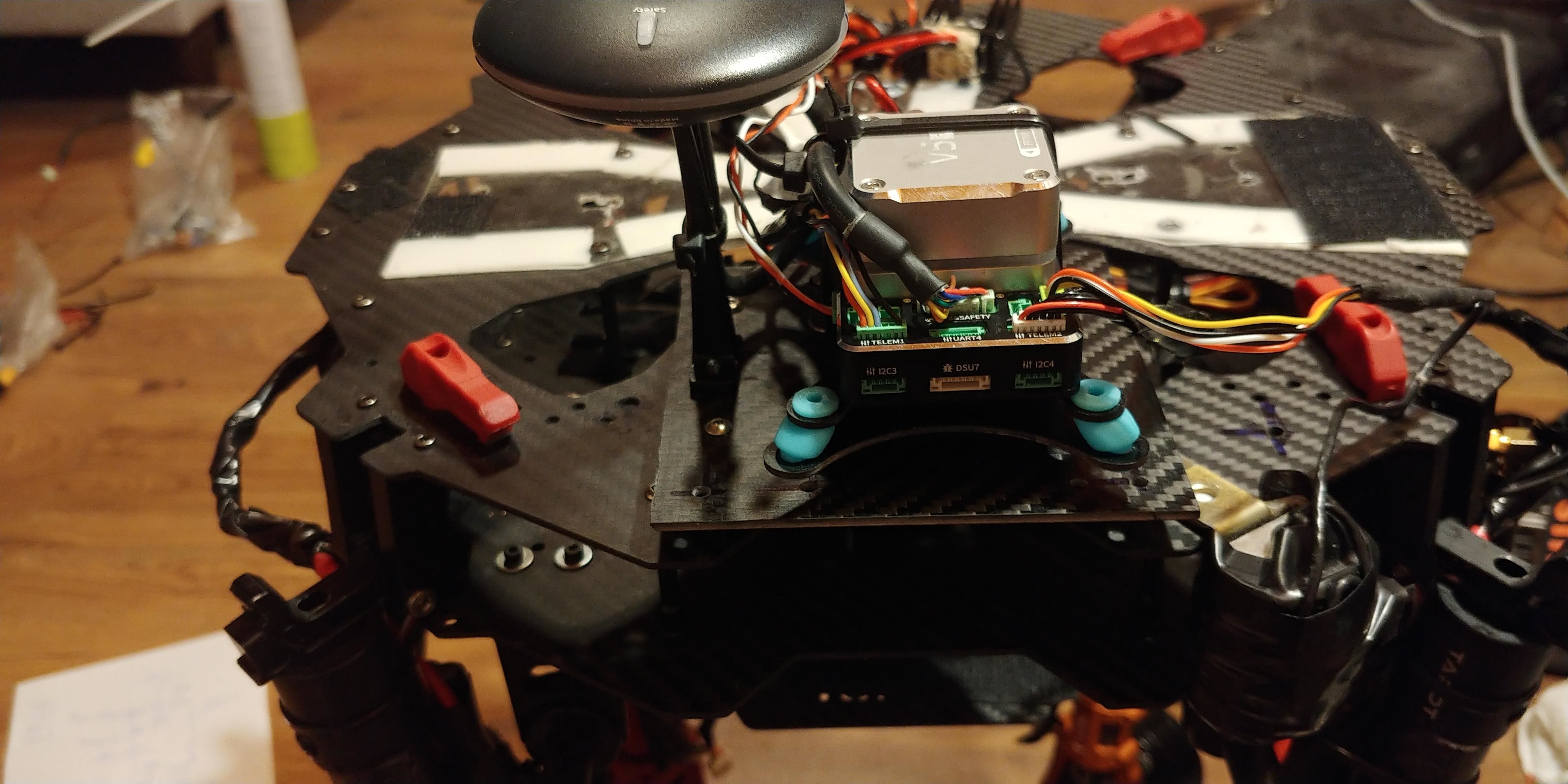
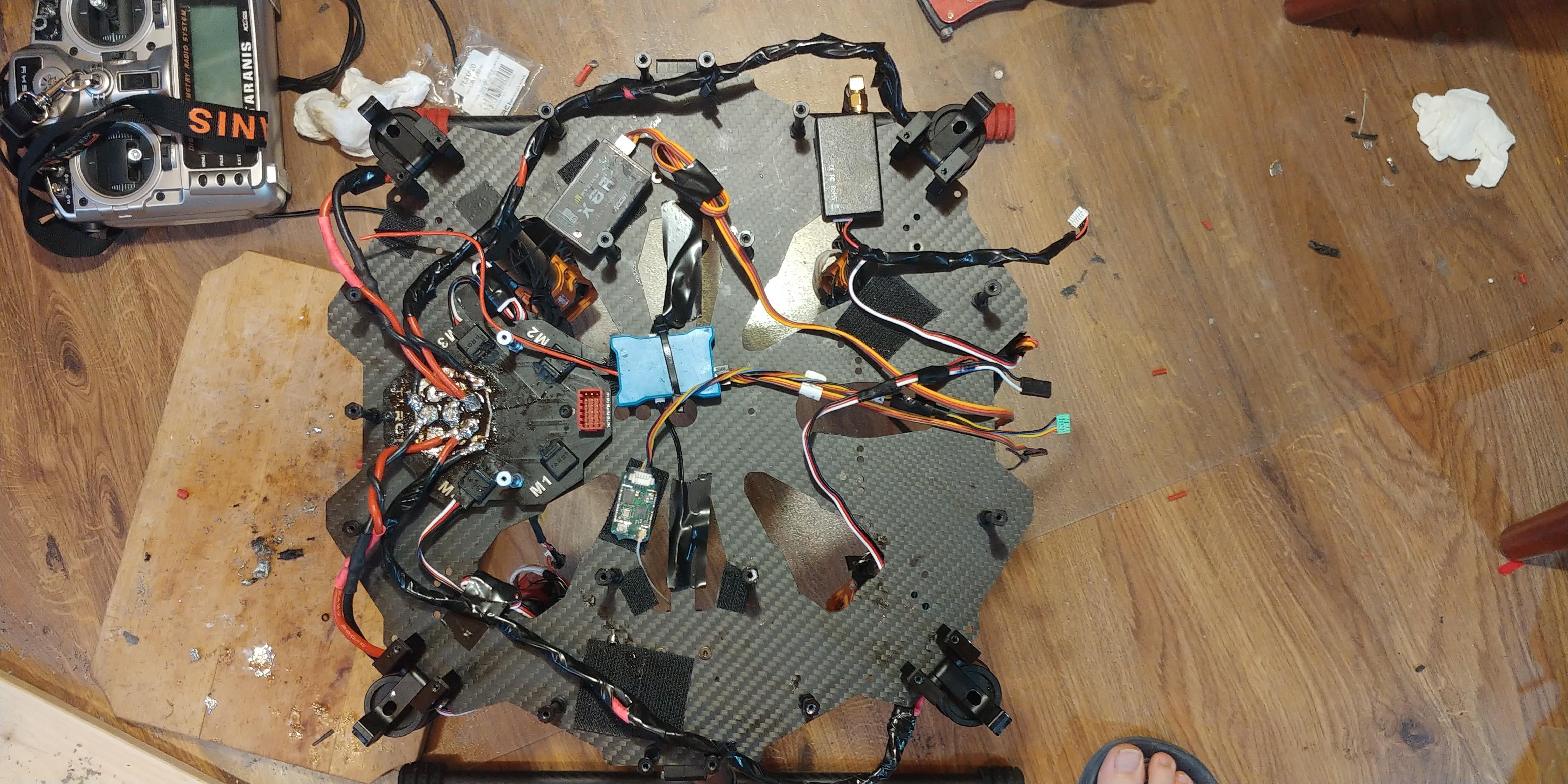
What I’d be most concerned about is the cable ties and cables all touching the flight controller. The wires all need to come out of their connector sockets freely without touching the FC. They need enough flexibility to NOT be transferring vibrations, but not so much flex that they are flapping around. The GPS cable is always an obvious one - it’s got heavy duty outer protection and needs to be routed away from the FC, and secured to the frame properly. I’ve trimmed off the outer covering a couple of inches to allow the small wires more flex near the FC, so the heavy outer covering is not near the FC.
I’d remove that antivibration mount under the FC and just mount it to the frame with good quality 3M double sided tape - that V5 has internal vibration damping. That mount will provide too much damping for accels and gyros - the FC wont be moving accurately with the frame.
You should be able to run those motor wires inside the arms.
Although Fabian post can look exagerated, it makes sense. Calibration is quite cumbersome, longer than dji, can be difficult on large drones. Randomly, Compass initialization can lead to “misleading” messages in console and it doesn’t have a proper “bad calibration failover” or detection mechanism during flight. Additionally, most compasses go through i2c which is a unreliable and shared data bus, while nowadays there are much better options for such a critical component. Think about you have an erratic device, like a led light, on the same bus and EKF will be fucked up in the wrong moment. Also there isn’t a real rendundancy on that, so if your flight relies on a GPS mode, your safety is hanging on a single, poorly made and poorly connected component
Internal one can be used for correctness verification of the external one.
The only issues ive had with difficult initial compass Cal was from a dodgy chinese knock off gps/mag that was internally installed upside down. Once I added a “roll 180” to the orientation it was sweet. Many flights no need for follow up calibrations, no relax fitting etc…
Just buy good expensive hardware and a lot of the issues will be gone.