Ok, here goes…
A. Please define each of the harmonics that can affect the Pixhawk 2.
The harmonics which can affect the Pixhawk 2 are those for which the internal damping is not effective. Passive vibration damping systems have a natural frequency, or resonance, defined by the stiffness of the ‘spring’ and the damped mass. At this frequency, the damping will not function effectively and may amplify vibration.
Below that frequency the efficiency of the isolation will drop, and above it will increase. The stiffness of the damping material determines the shape of the transmissibility curve. Stiffer materials show less resonance at their natural frequency, but the roll-off in vibration isolation above that is shallower. So there is a tradeoff, softer damping is more effective at reducing high frequency vibrations, but at the cost of being more susceptible to resonances.
Harmonics of the natural frequency will also have an effect, particularly those below it. The Pixhawk 2 has 3 onboard IMUs, of which 1 and 2 are on the damped section. Using the FFT function in Mission Planner, you can therefore compare vibrations from the frame (assuming the PH2 is hard mounted) to those being transmitted through the damping material.
Here is an FFT of a 2 minute hover. ACC3 shows the undamped vibrations reaching IMU3, there are peaks at ~180Hz and ~60Hz. The amplitude of the peaks is 0.12-0.14. When comparing ACC3 to the ACC1 and ACC2 graphs, the 180Hz peak is reduced (by about half) but the 60Hz is amplified (almost double).
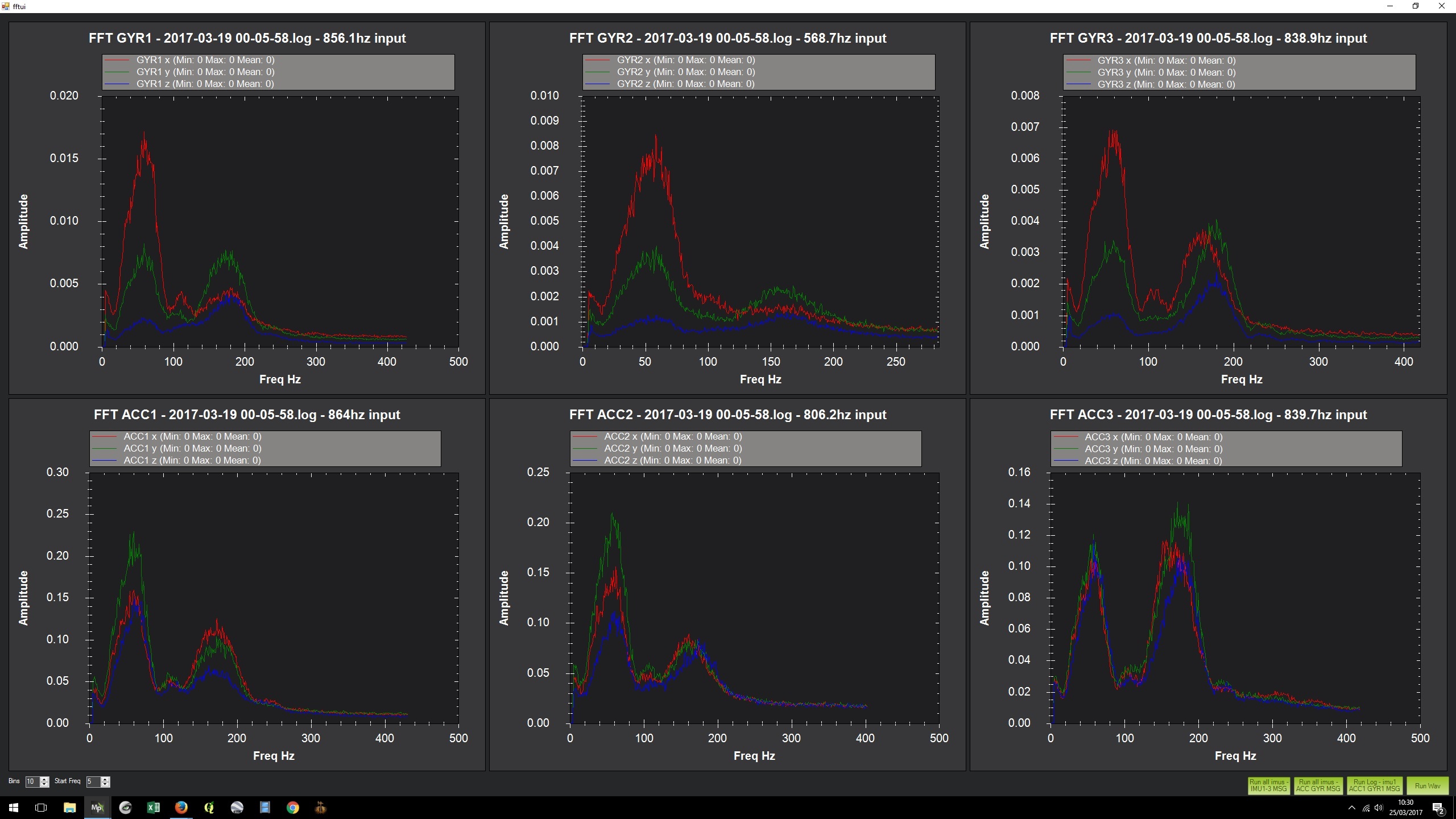
So it appears that the natural frequency of the Pixhawk damping system is around 60Hz. Harmonics of this frequency, particularly sub-harmonics, will also be less affected by the internal damping (15Hz, 30Hz, 60Hz, 120Hz, 180Hz, etc. etc.), and will add to the vibration at the natural frequency.
In a multirotor the vibration sources (props/motors) are not in phase with each other, but as the rpm changes, they might pass through moments of being in phase (or out of phase), which could cause moments of increased (or decreased) vibration.
B. What is the effect of these on flight?
In general vibrations cause problems with position estimation (accelerometers) and attitude (gyros). Severe vibrations cause obvious problems with erratic behaviour in flight. If the vibrations are not so severe as to interfere with the ability of the craft to fly, they can still cause problems in GPS assisted/automated flight modes. Poor position holding, causing the craft to drift in one direction or the other when holding position, is one symptom. Increased susceptibility to wind or turbulence causing unusual or hesitant appearing automated flight is another.
Hitting the frequencies or harmonics of the Pixhawk 2 can cause a sudden jump in vibration levels. For example, if the prop RPM in the hover is close to the natural frequency or one of its harmonics, flight characteristics may be mostly OK, but exhibit periodic divergences as frequency and phase relationships change. When a divergence becomes severe enough to get through the noise, the motor rpm correction will probably change the dynamic relationship and restore good control.
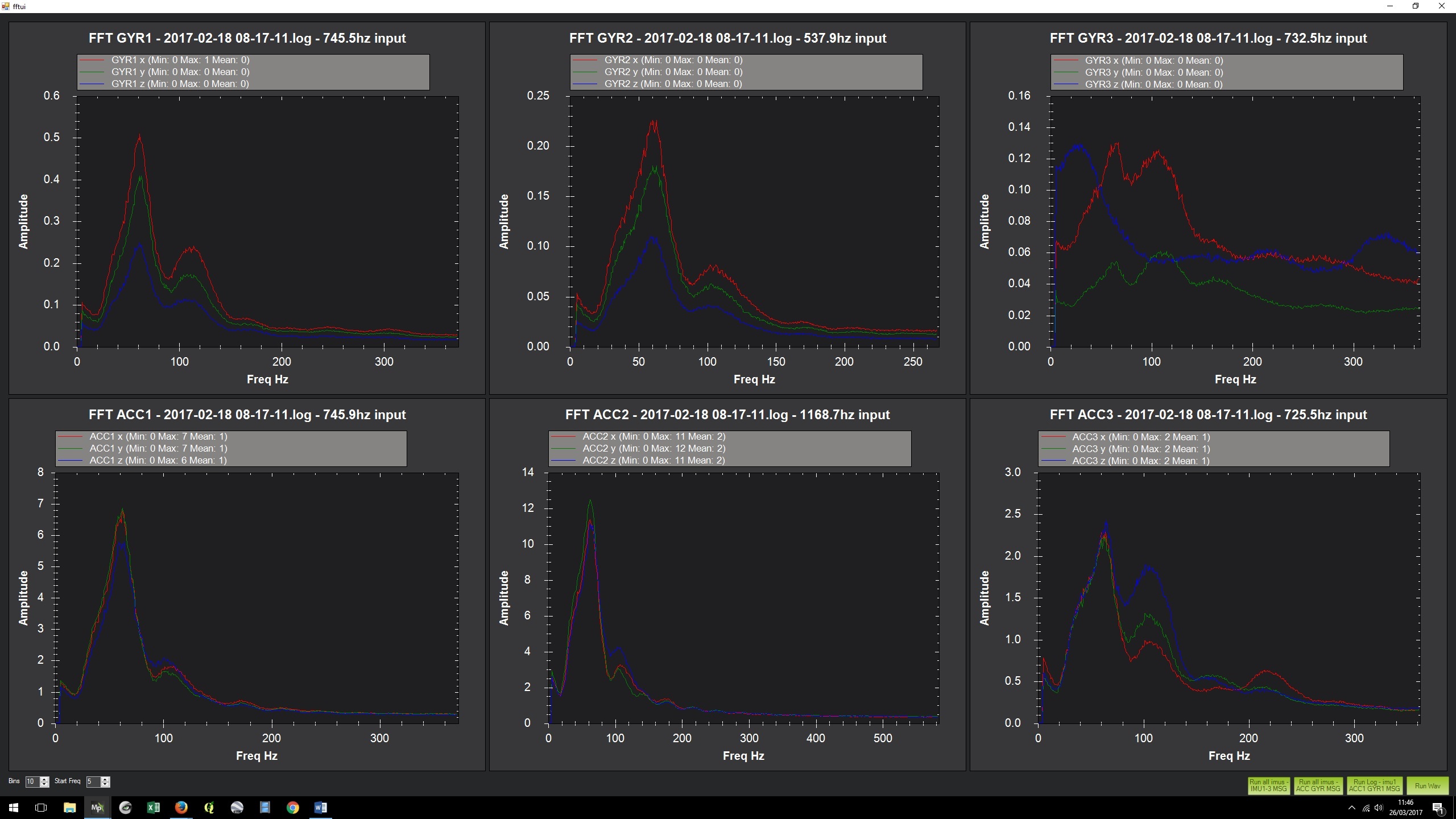
Here is an FFT of a fairly long flight – same model as the FFT above, but an earlier incarnation which was not flying in a confidence inspiring way
C. How can someone measure this on their airframe?
Using the FFT function in Mission Planner. To do this you need to:
- Enable full or high rate logging using the LOG_BITMASK parameter
- Carry out a test flight
- Download the logs
- Ctrl-F in Mission Planner to bring up the ‘temp’ menu
- Hit the FFT button and chose ‘run all imus – ACC GYR MSG’
- Compare the ACC/GYR3 results with the other two IMUs
(The amplitude is relative, longer flights will produce higher numbers. Also be aware the scale will be different for each of the charts by default, this needs to be taken into account when interpreting the results)
D. If your airframe has vibration in these bands, what can be done to protect the system from this?
Propeller RPM, or possibly a resonance excited in the frame by the prop RPM, is going to cause these harmonic frequency related problems. If the frame is stiff enough, then changing the prop RPM is the simplest way to investigate or alleviate the problem. This can be achieved by changing the prop size, pitch or number of blades, or the all-up-weight of the model. If that cannot be changed enough to reduce the problem then an additional damping system could be used, chosen to be effective at the problem frequency.