It works exactly as I said. The colors are standard per the notification library. You are over complicating this massively.
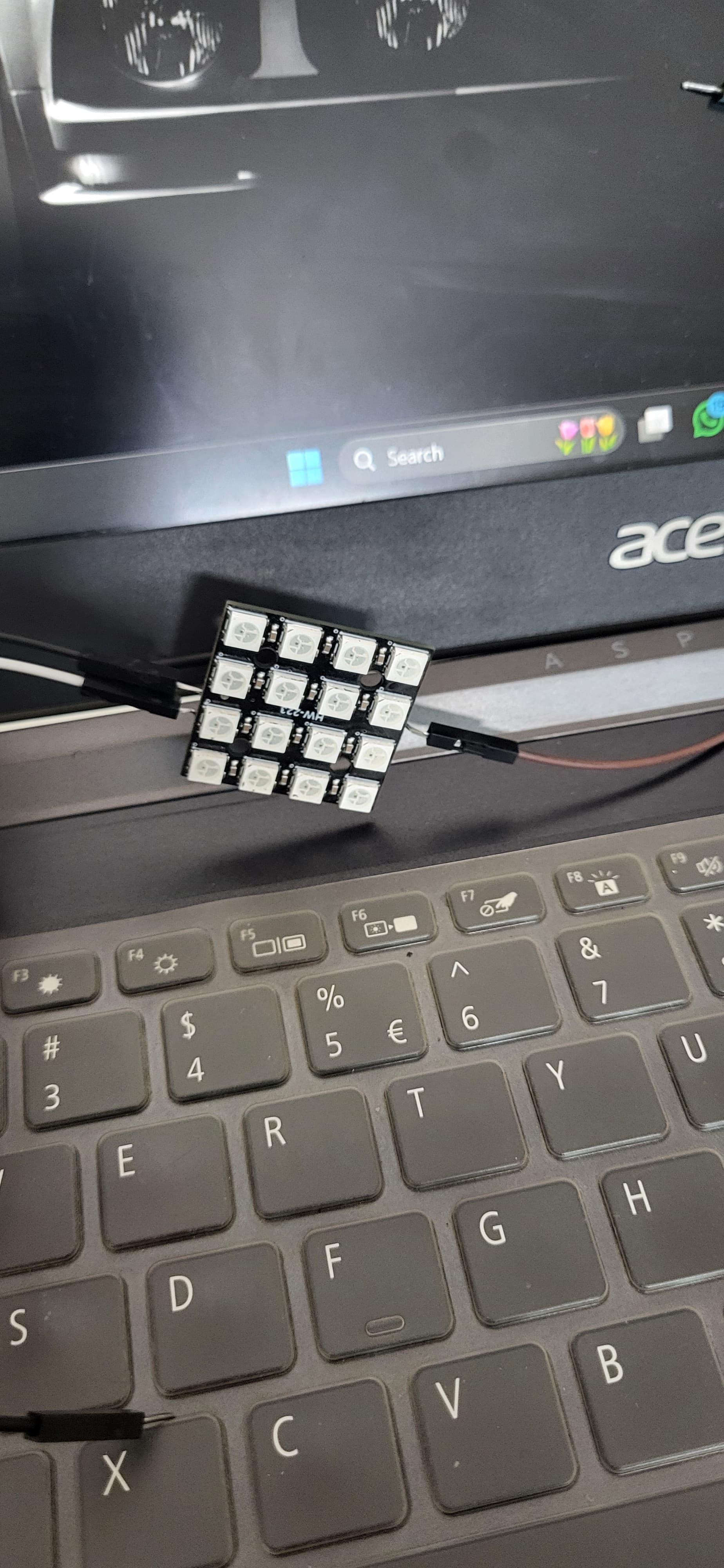
to the power pin i supplied from arduino mega,but the led is not glowing
okay . can you please say the steps how to do?
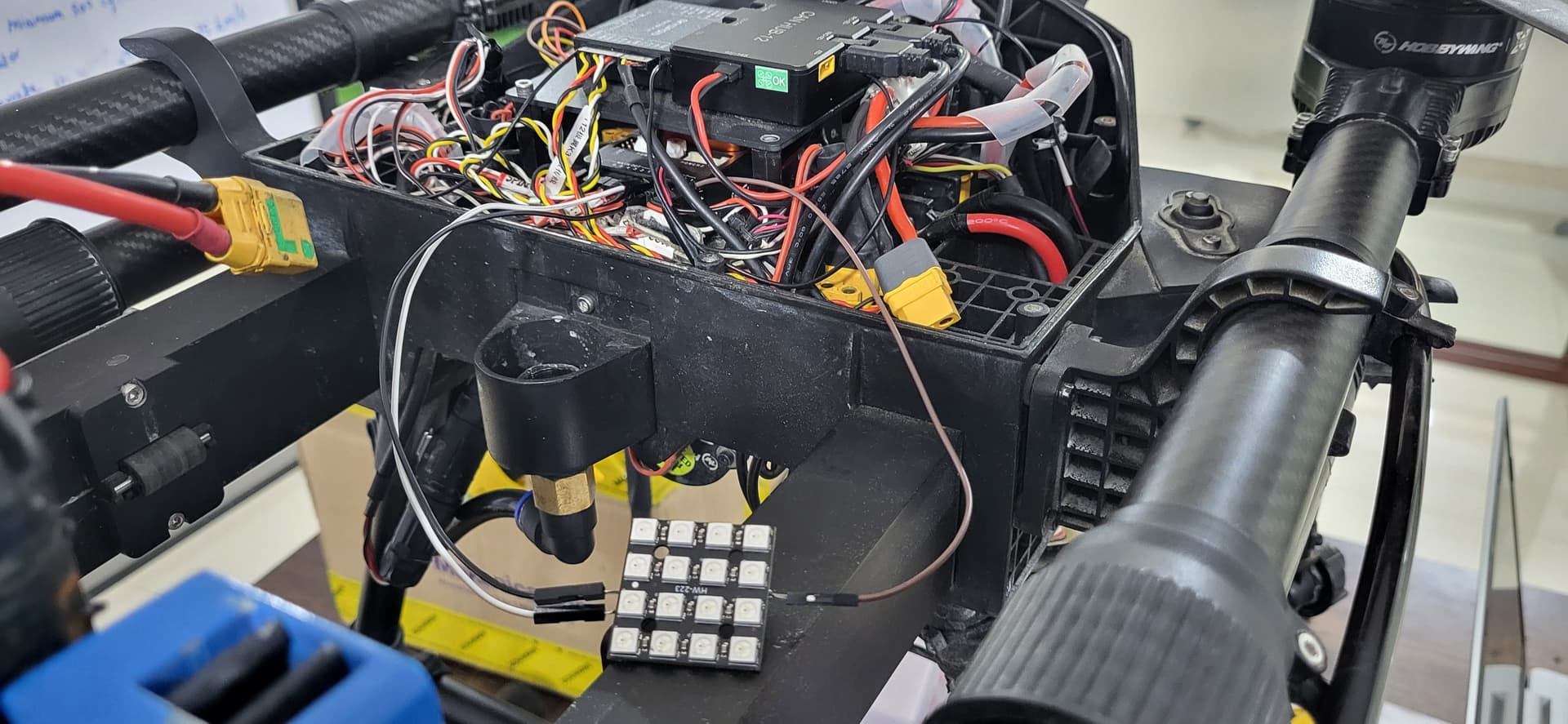
You may want to show your connection photo and Ardupilot-related parameters. What is Arduino mega capability and voltage level? What type of LED are you using?
Maybe this additional article helps:
I don’t know what else to tell you. You don’t need a giant Arduino + scripting to get notification colors with WS2812 LEDs. Connect the data pin to an AUX output, power them appropriately, and configure the parameters per the documentation.
thank you yuri,“power them appropriately,” i powered them using arduino mega or you have idea how do i connect them
You need a 5V source (like from a BEC) and common ground with the autopilot. Get rid of the Arduino.

Likely a power issue or a power + parameters setting issue.
Where does your LED power come from? Without the LED connection, check the servo rail power is healthy with a Voltmeter. Double-check your ground and signal pin; do not wire incorrectly.
OR
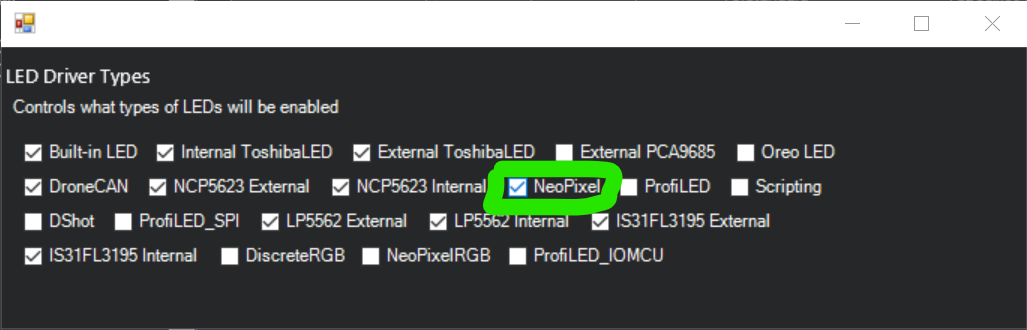
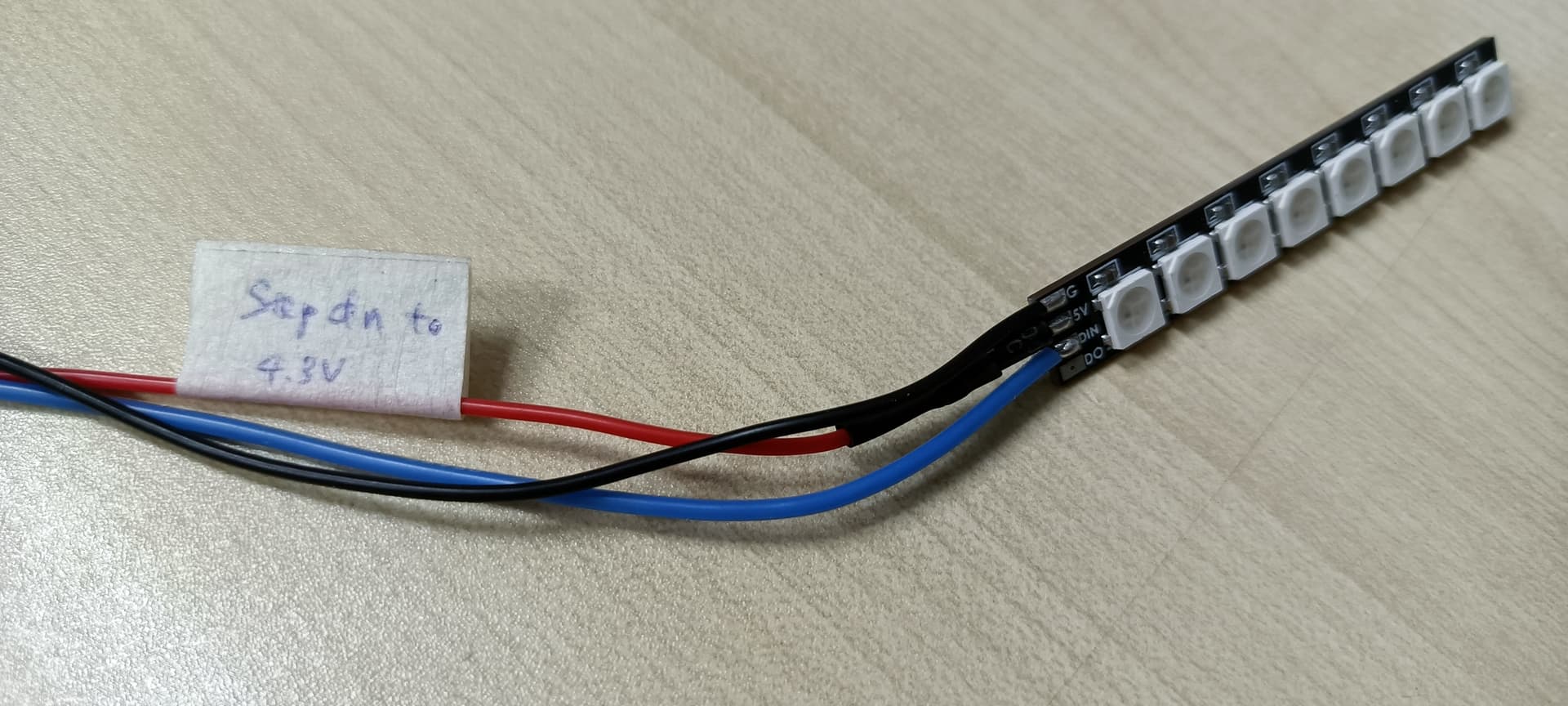
Most WS2812 style LED and strings will operate correctly when connected to the autopilot. However, if you get intermittent or non-operation, you may need to implement one of the configurations below. This is due to the fact that the autopilot outputs swing to 3.3V but the worst case input signal high spec for the LED is 4.3V at a 5V supply. So at extremes of tolerance/manufacturing spec, you can get a combination which will not work correctly. In that case the easiest solution is to lower the LED supply as shown below.
As @Yuri_Rage said, forget the Arduino Mega and try direct native support first.
My settings and did a step down voltage using a diode.
NTF_LED_LEN,8
NTF_LED_TYPES,123367
SERVO11_FUNCTION,120

thank you jai and yuri for your guidance. it helped me a lot. i got the output.
hii yuri and jai
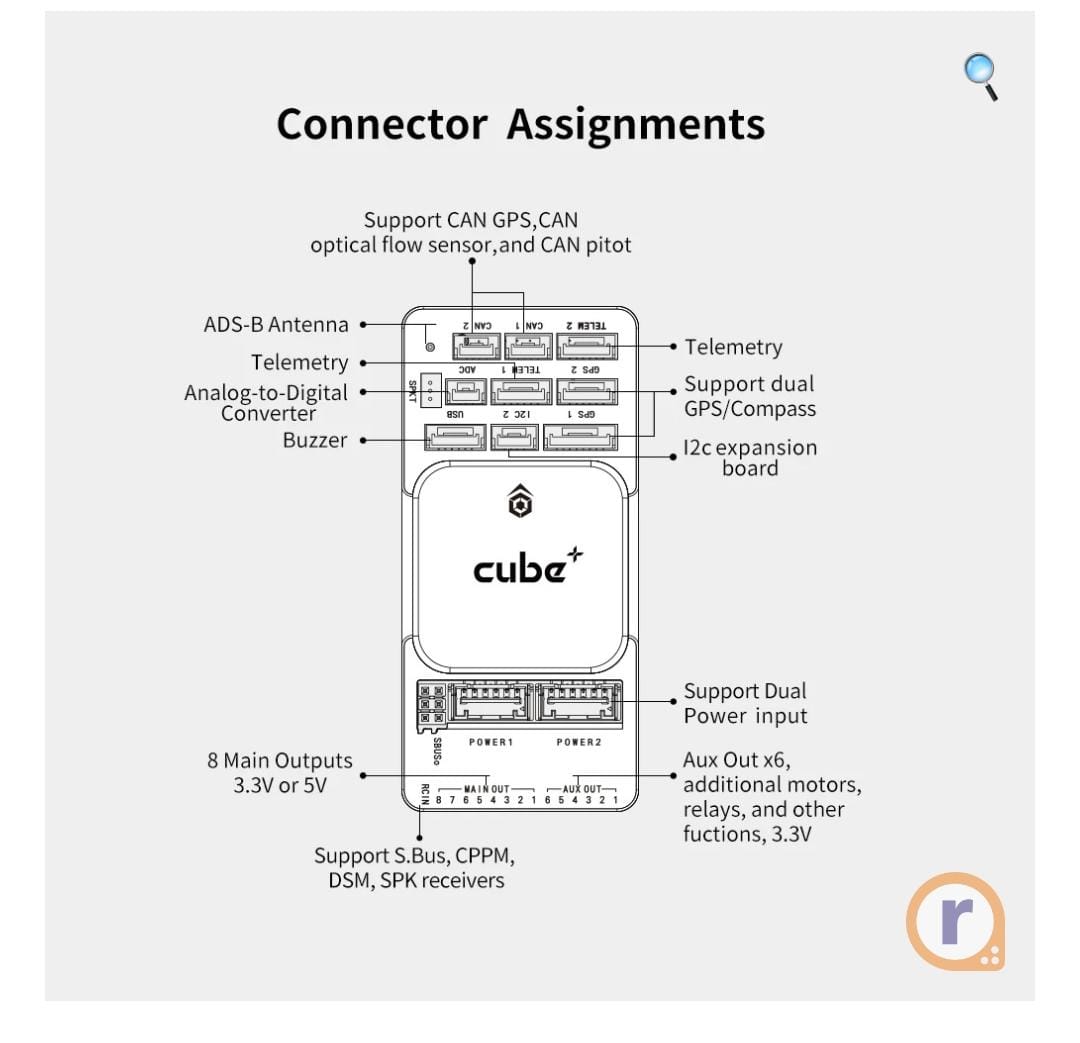
I am currently working on a drone project that uses a Cube Orange+ flight controller paired with the Skydroid T12 transmitter system. As part of a training setup, I would like to implement a master-slave transmitter configuration, where:
- A client uses the T12 transmitter to operate the drone during training.
- In case of any issue or emergency, a button on the owner transmitter can be pressed to instantly hand control back to the owner’s transmitter (master).
To achieve this, I plan to use the TX3 and RX3 pins on the Skydroid T12 receiver to connect to the TELEM2 port of the Cube Orange+. I would like to confirm the following:
- Can the Skydroid receiver send or receive RC input over TX3/RX3 UART, and is this supported by the Skydroid T12 system?
- Are the logic levels of the TX3/RX3 pins compatible with the Cube Orange+ (3.3V)?
- Is there official documentation or guidance on implementing master-slave or trainer-style switching between two Skydroid transmitters?
I am thinking configured the Cube Orange+ with the following parameters for TELEM2:
SERIAL2_PROTOCOL = 23(RCIN)SERIAL2_BAUD = 115- RC_Options=10 this parameters are according to the documentation Multiple Radio Control Receivers — Copter documentation
I would be grateful if you could confirm whether this setup is correct or suggest the best way to implement this feature safely and reliably using Skydroid hardware.
Looking forward to your guidance and support.
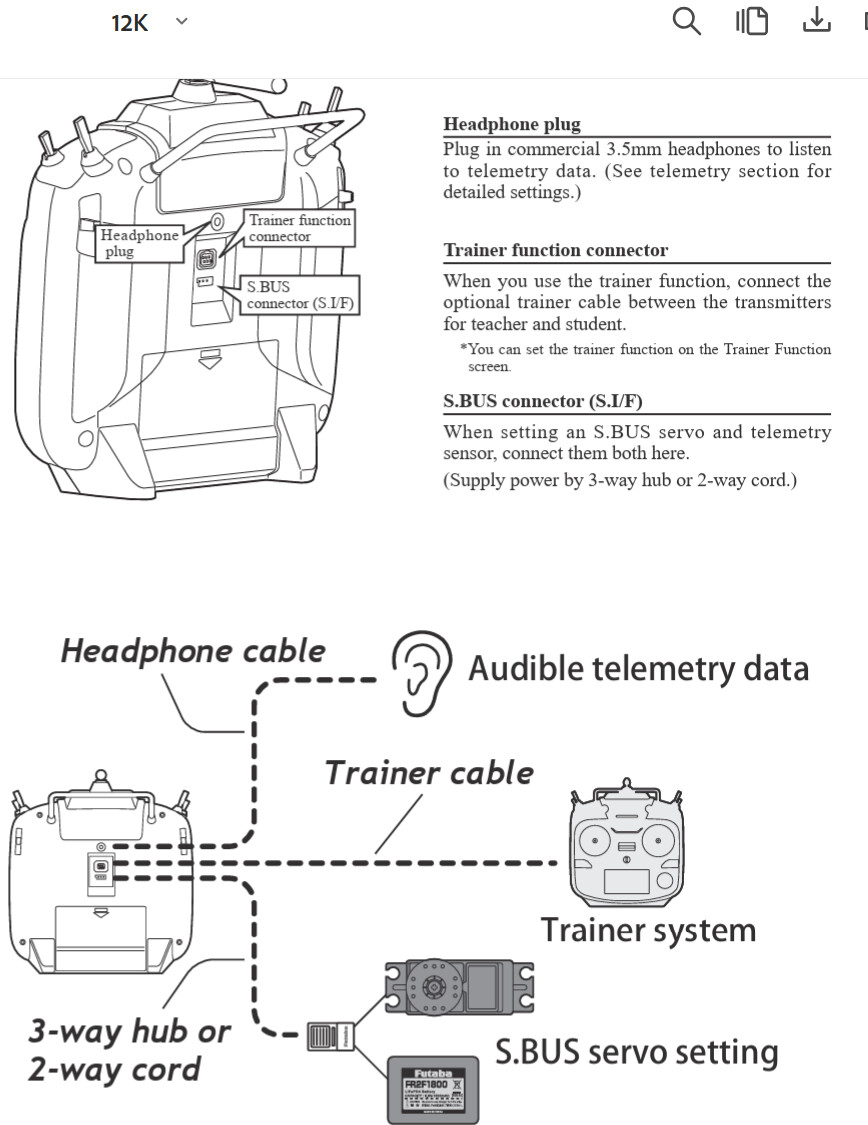
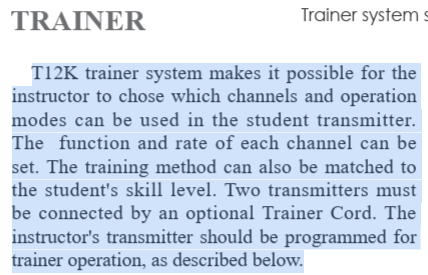
You can use a Futaba RC, for example T12K, under Trainer mode. Then you can couple with a Sik Radio to achieve Smart RC again.