Getting auto-analysis fixed up would be a big help - especially for us novices.
Even though it’s out of date, it still reports optical flow settings. Helpful - more so if I had high confidence in them.
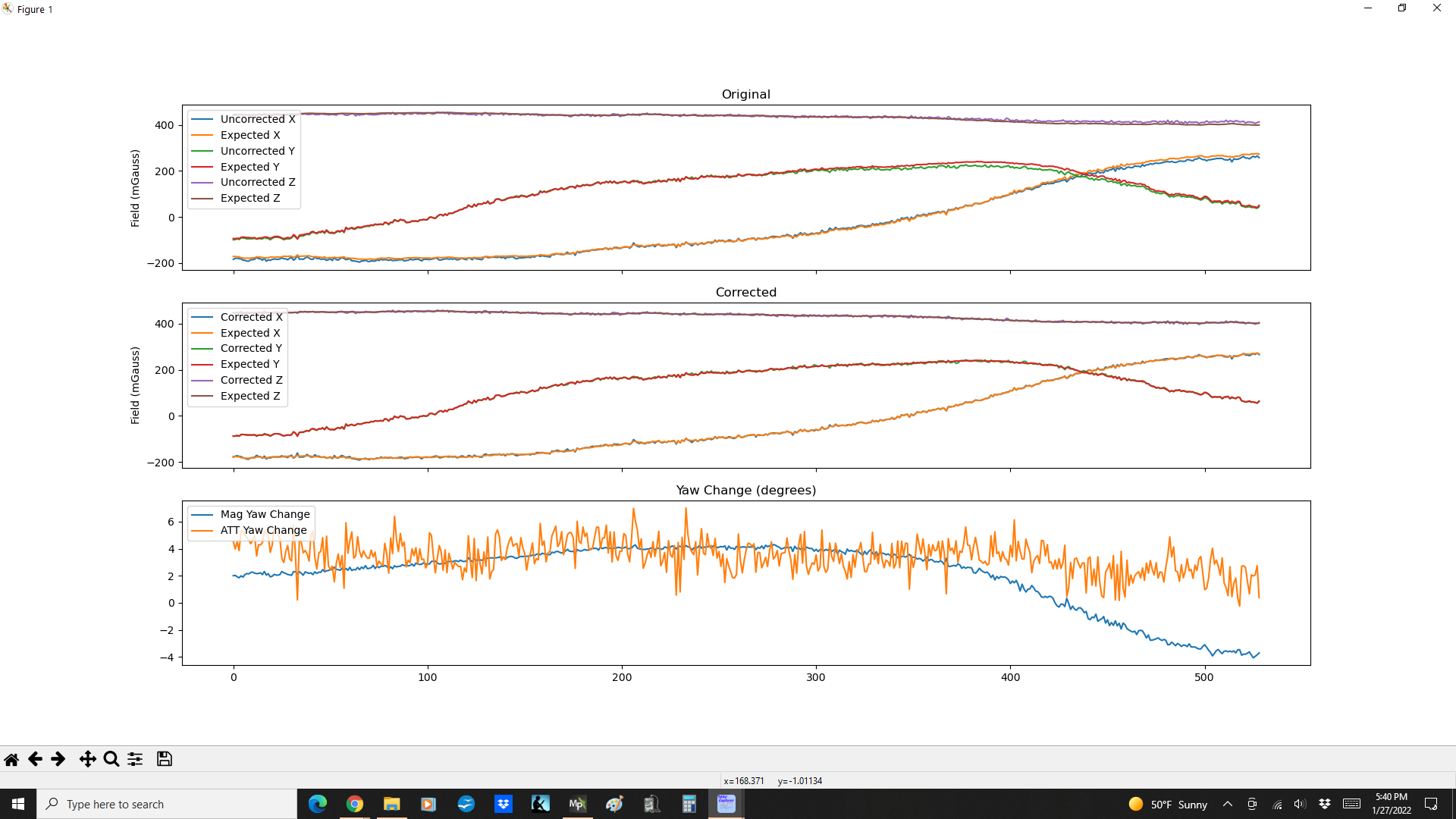
A bit off topic - but do you know who supports MavExplorer? I like MavExplorer’s MagFit tool - but I have to use a revision that’s 5 or 6 revisions out of date - MagFit doesn’t seem to work on the newer revisions.
Just checked Auto-Analysis. Yes - seems to be working again.
I noticed that it’s not reporting motor balance they way it used to. Now it shows: “Test: Motor Balance = UNKNOWN - ‘QUAD/X’”
I’ll have to spend more time to verify other details. But looks really promising - please extend my thanks to those who did the work to bring it back to life!
I’m not sure what “not working” Discord link you’re referring to.
I’ll check MagFit on the latest MavExplorer. I’ve been using 1.8.39.
Ahh this is a rover. I was like that is really nice mag data… You may want to be sure you did a bunch of circuits to get good data for the fitting tool. I have seen rovers with much worse fits
Because your initial calibration was pretty darn good then.
I was thinking a rover maybe because with those you wont have as much 3D dimensional changes. And so calibration errors in some axes may not show up as easily since you are not moving much in those axes.
Thanks for the compliment on the compass calibration. I don’t know when this flight took place, but I’ve used either MagFit or “compass learn” to do the calibration. So the credit is due to the developers - all I did is push the button…