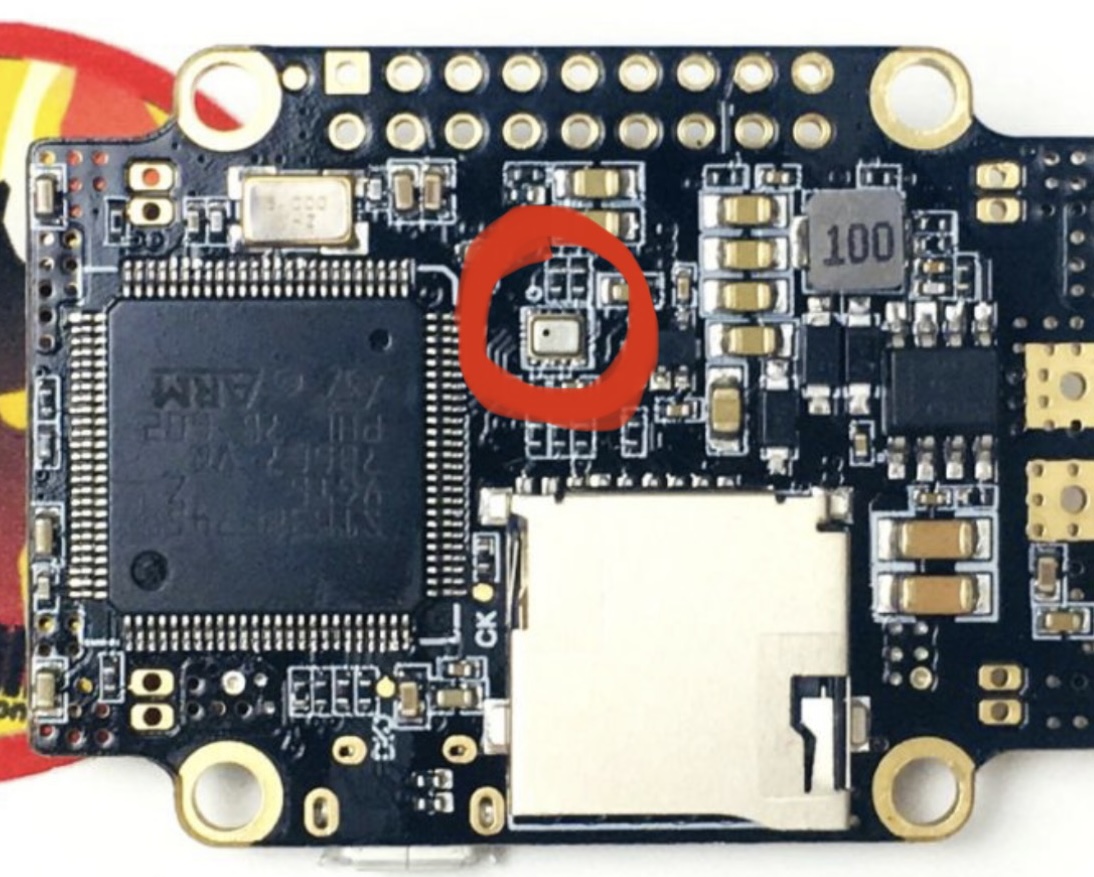
Makes sense. Pretty sure this is the Baro on this board. Also pretty sure there’s some hot glue and Velcro over this component on my build. That would explain that!
I thought all of that was on the top of the board. Should have looked closer