This is the CG location I’m using in RF8:
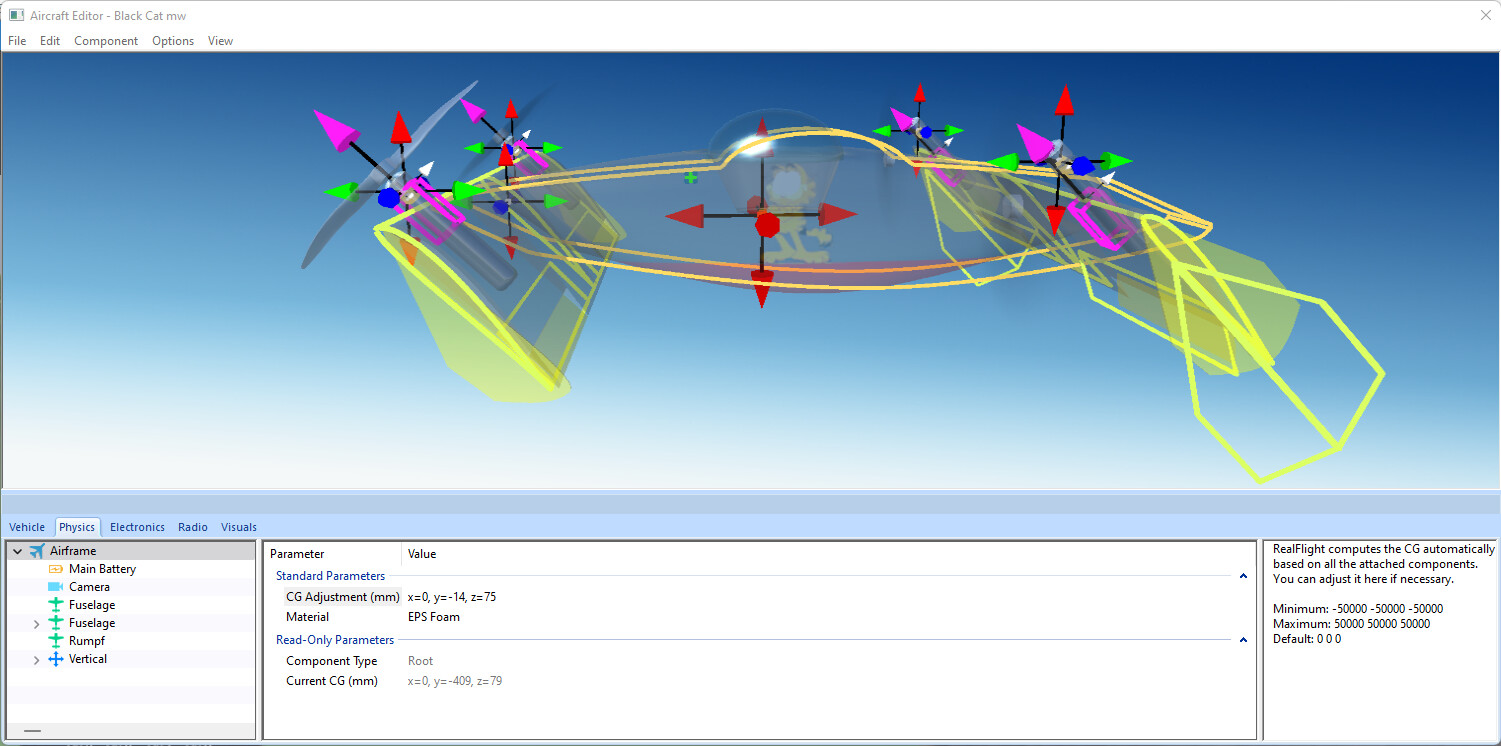
All the control surfaces are set up as elevons.
Flies OK in FBWA today, but VTOL modes are broken. I probably need to change some of the tailsitter parameters to fly it on current master.
This is the CG location I’m using in RF8:
@losawing I was going nowhere for a couple of weeks and started playing with options. The 2 bits set for Q_OPTIONS: 7 Force Qassist, 8 Mtrs Only Qassist
I will turn off q_assist and q_options and give it a try.
@kd0aij Nice design. It’s very similar to what I have… Mine is out of foam. What are you FW PID values?
I hope plane autotune will be more successful with qassist disable.
This is the result of autotune on master. Autotune seemed to work pretty well:
AUTOTUNE> param show ptch*
PTCH2SRV_RLL 0.5
PTCH2SRV_RMAX_DN 75.0
PTCH2SRV_RMAX_UP 75.0
PTCH2SRV_TCONST 0.75
PTCH_RATE_D 0.00421083904803
PTCH_RATE_FF 0.235401317477
PTCH_RATE_FLTD 10.0
PTCH_RATE_FLTE 0.0
PTCH_RATE_FLTT 2.12206602097
PTCH_RATE_I 0.235401317477
PTCH_RATE_IMAX 0.666666686535
PTCH_RATE_P 0.134418964386
PTCH_RATE_SMAX 150.0
AUTOTUNE> param show rll*
RLL2SRV_RMAX 75.0
RLL2SRV_TCONST 0.5
RLL_RATE_D 0.00340734468773
RLL_RATE_FF 0.29327070713
RLL_RATE_FLTD 10.0
RLL_RATE_FLTE 0.0
RLL_RATE_FLTT 3.18309879303
RLL_RATE_I 0.29327070713
RLL_RATE_IMAX 0.555555582047
RLL_RATE_P 0.0990272238851
RLL_RATE_SMAX 150.0
Here are my QASSIST params:
Q_ASSIST_ALT 0.0
Q_ASSIST_ANGLE 10.0
Q_ASSIST_DELAY 0.5
Q_ASSIST_SPEED 0.0
@losawing it never occurred to me that qassist was interfering with autotune. Good catch!
@kd0aij Thanks for the info. I will experiment with your PID values since mine are clearly the default.
I will have a chance to fly tomorrow and try the pid values, new CG, and autotune.
Thanks in advance!
I’d be a bit wary of the RealFlight PID values given that there are probably significant differences between my specifications and your actual model.
My RF8 model has a flying weight of 2.8kg and wingspan of 770mm with chord of 200mm. Also, I’m getting simulation frame rates in the 100-200Hz range which should be adequate for FW flight physics, but perhaps too low for really accurate simulation of PID loop behavior.
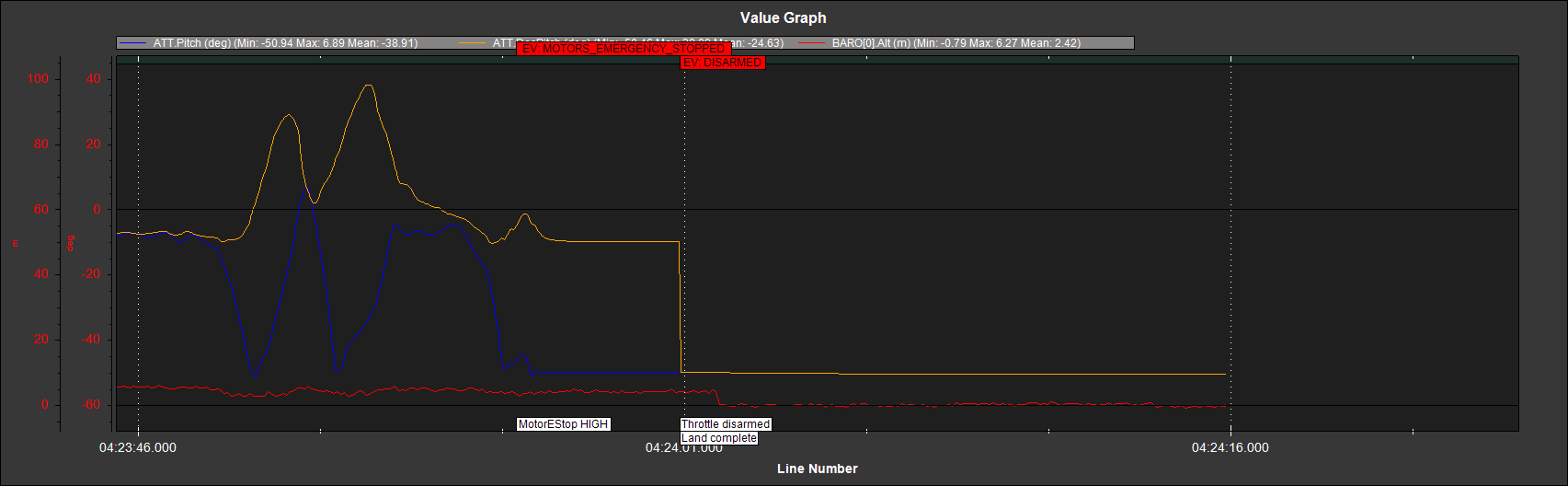
I had a spectacular crash as soon as I tried to autotune with newly calculated CG, q_assist and q_options both turned off… Need to fix the plane and try again.
sorry for the crash,
Did you try fbwa before switching to autotune, was it better or not ?
I went from QHOVER directly to AUTOTUNE and it crashed. Unfortunately, I did not try going to FBWA.
I compared parameters given par Mark and yours.
Rll parameters are close
But some ptch parameters are very different. FF is about 6 time higher and _P is 40 time lower.
For comparison, I have a pixhawk loaded with plane 4.1.3 default parameters : _P = 0.04 and _FF=0.345
I flew with Mark’s parameters today. However, going from qhover to autotune was the problem (I think).
maybe not, Autotune is a plane mode and the transition from qhover should be OK (I think too ![]() ).
).
If CG is correct and parameters too I am trying to figure what could be wrong.
In the log you posted arming check is disabled.
You have q_ftame_type=1 which means differential torque for yaw. Propellers must spin according to the drawing I made post 7.
Hold your plane in fbwa and pitch it up, front wing control surface must deflect upward and and back wing control surface must deflect downward 'provided all surfaces are elevons)
Thanks for all the feedback. I finally got the model fixed. I flew using same parameters with qassist and qoptions enabled just to make sure I don’t crash again… With the CG moved forward, I am getting a lot better flight characteristics. The oscillation is minimal, but mainly due to me trying to correct nose dipping (I believe CG needs to move back a bit). I will try to autotune tomorrow once I get the CG right.
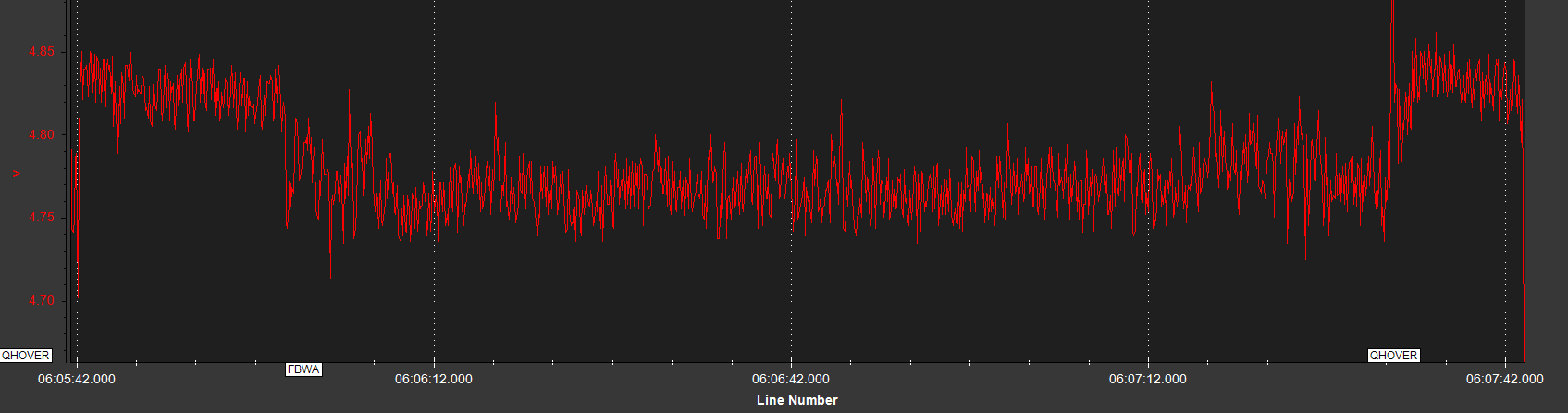
One thing that I am not understanding… Oscillation in POWR (VCC) has not improved. Does this point to something wrong with construction or is it normal?
I am very glad your aircraft is now flying OK, I hope to see a nice vidéo.
You need now to tune copter PID too and very important to choose and tune a gain attenuation method. I recommend the disk load theory gain attenuation method or attitude throttle method.
About your plane wanting to pitch down, did you check or tune control surface trim ?
Due to CG position, there is more weight on the front wing, this is something mandatory, but due to this higher load the front wing must have a 1 or 2 degree positive angle relative to the back wing.
Power VCC something else. If you want to look at ampere draw check at batt log, if you want to look at throttle output check servo output or CTUN_th (for plane) or QTUN_th (for copter)
I flew again with qoptions=0 and transition from VTOL to FBWA put the plane in nose dive and it crashed. That was pretty much the only change from my previous successful flight (qassist was still set to 15).
It seems that with qassist and qoptions enabled, I can transition and fly, but I can not autotune. Turning them off (in this last case turning qoptions off) causes a nose dive during transition.
The other issue I have is that the log is not always being recorded. It’s a hit and miss. I even changed the sd card, but still the same!
Did the elevons go to full up during/after the transition? Perhaps the pitch PID gains are too low (assuming the CG is correct).
Yes, elevons go up during transition.
I flew again with q_assist_speed at 0, but qoptions was still set to 384 (bits 7 & 8 set)… The transition was good. In addition, I adjusted my angles of attack as follows: front wing at +2 degrees, front motors at 0 degrees, and rear wing and motors at 0 degrees with respect to the pixhawk. The flight is good now (no nose down).
A couple of things remaining:
Almost there… Thanks a lot!
I haven’t thought of a good way to deal with that problem on landing. The attitude controller wants to maintain a “nose up” attitude, but the blackfly platform needs to tilt forward as the motors shut down. The problem is knowing when to do the tilt since triggering it prematurely would be pretty bad. A weight on wheels sensor would probably be practical… with that, we could just shut the motors down immediately on contact with the ground.
hello Mark, I agree and it was the behavior we observed on my little blackfly some months ago. But why a bellysitter behave differently ?
If you set RCX_OPTION=82 you can choose, depending on switch position, to force / enable / disable qassist. Maybe it will help to find what is going wrong.
I believe that assistance not “interfere” with autotune but while qassist is triggered or forced your blackfly is stabilized by the copter controller so no chance to tune plane PID. To be confirmed however…