Amazing! Thanks so much for this…
T
Here is my Param List attached.
Main differences were
BRD_Type 2 on biwing and 24 on mine
Q_FRAME_CLASS, 1 on biwing and 10 on mine
RSSI_TYPE, 1 on biwing and 0 on mine
Tried to make some changes… still not signal on i/o PWM or motors.
Thoughts
TTandemParam-Feb22.param (20.7 KB)
@Tim.Talon I take it you’re using a Holybro Pixhawk4?
Have you had any success with it at all, perhaps with a simple plane or quadcopter configuration?
Your Q_TAILSIT parameters are different from Pierre’s, MOTMX=1 will enable only motor 1 in FW and manual modes, I think.
Some history…
Arduplane tailsiter begun almost 3 years ago thanks to tridge with dual motor configuration vectored or not, the parameter to make a dual motor tailsitter was q_frame_class=10
About one year ago mark begun yo develop what we call now copter tailsitter. Actually only tri motor, quad+ and quad X are supported and the parameter to make a quad tailsitter is q_frame_class=1.
Q_frame_type=1 is the parameter for the X configuration with differential motor torque for yaw control. Mark will correct me if I am wrong.
Q_tailsit_motmx : Bitmask of motors to remain active in forward flight for a ‘copter’ tailsitter. Non-zero indicates airframe is a tailsitter which pitches forward 90 degrees in forward flight modes = 15 if you want all 4 motors running in forward flight.
Edit: I made a parameter review and did not find why output does not work. There are some tuning parameters that should be changed though.
1 Like
Yes Mark, it is the Holybro Pixhawk4.
Maybe what I will do is to take a step backwards and do as suggested, save my setting, and restart a very basic plane load… see if everything works, and then work toward the tail sitter.
@losawing the history is helpful! Does the Pixhawk lite have a barometer? Are you using the GPS as well? Have you flown any missions yet?
Pixhawk lite has just some missing output. It has barometer and GPS is mandatory.
Post 271 is a video of an auto mission with a depron model. It was OK exept the landing.
@kd0aij Wondering if I pick up a Pixhawk Cube 2.1 would you be able to explore adding the code for the 2 extra (forward flight) motors… or should I stick with buying a Pixhawk Lite?
@kd0aij, @losawing,
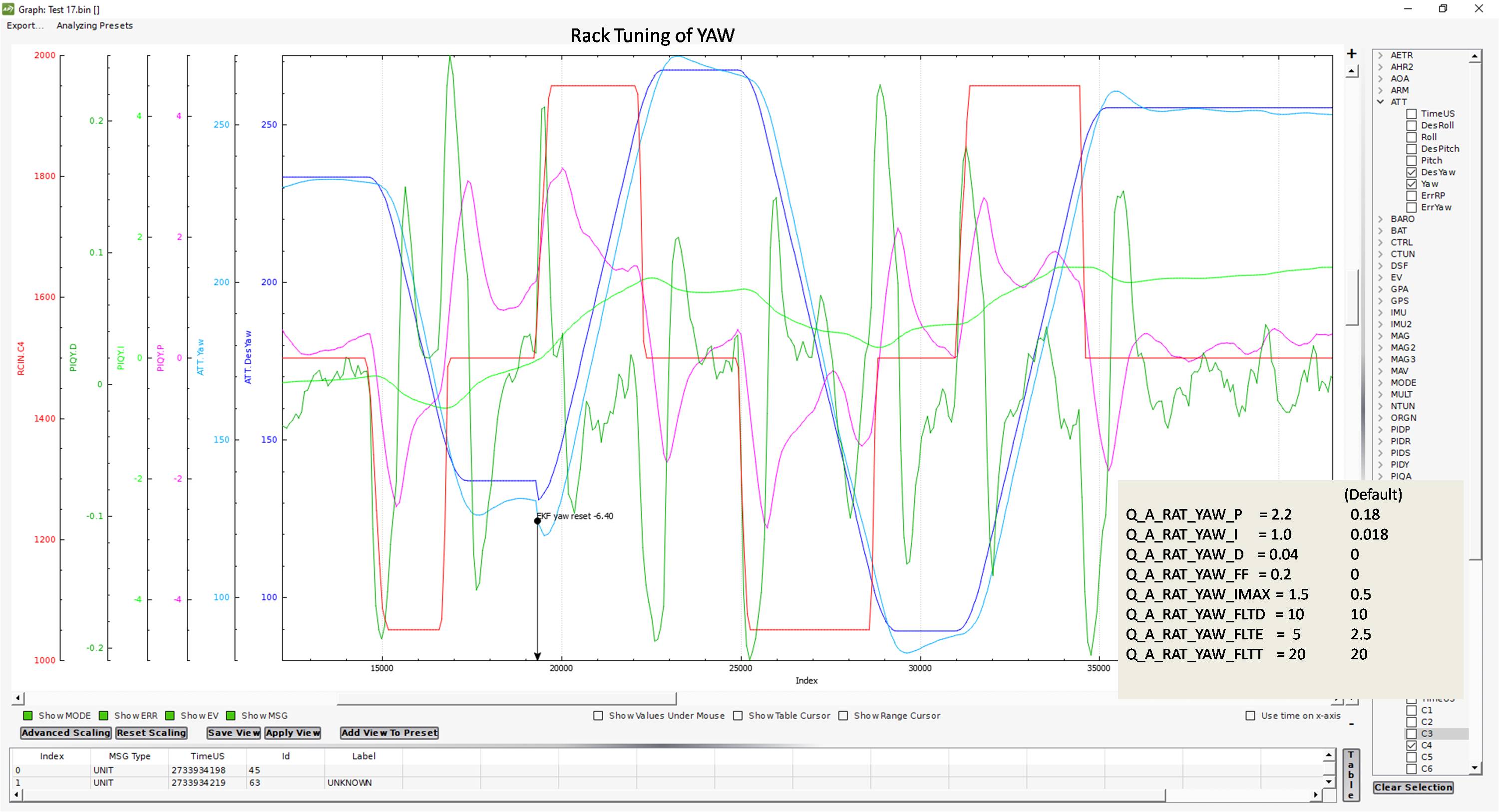
The thoroughly YAW Test in the Rack, shows why the first free fly had to go wrong.
The Graph shows nearly a good behavior on rough stick inputs. May be some improvements are possible. But look, how far away I’m now from the defaults, some even higher than recommended.
I learned a lot from the setup of the jetwing of losawing.
Will continue to find the Params of Roll and Pitch with the same methode.
1 Like
Pixhawk type does nlt matte, the full size standard one would be also very good
As Pierre says, any ArduPilot supported FC with enough outputs should work.
Regarding the 2 extra motors, are they needed in VTOL modes, or do the 4 wing motors provide sufficient thrust? What size motors and what prop diameter/pitch are you using on each?
I’ve ordered the new FC… should be here in about a week or so!
HOVER Motors - Ideally I would like the 4 wing motors + 2 pusher motors for hover, but stabilization only on the wing motors. The 2 pusher motor would be linked just to the throttle (no stabilization, just thrust).
FW FLIGHT Motors - Ideally I would like the 4 wing motors to help with the pitch over, but then shut down after a few seconds, leaving just the 2 pusher motors controlling airspeed (no differential thrust).
HOVER Control Surfaces - Ideally have the 4 wing Elevons behind each motor assist or fully control YAW… Wing Motors control pitch and roll in hover.
FW Flight Control Surfaces - Ideally have pitch and roll controlled only by Elevons… and Yaw only by Drag Rudders on the wingtips.
MOTORS - 2212 920KV and running 4s Batt with 30A ESC’s swinging the 9X4 DJI style self tightening props.
I going to spend this week building a new tandem wing as the other one was just a prototype and the hot glue joints and structure are all in rough shape from flying in the winter and snow.
Same motors and props for FW flight as for hover?
Why not just use 2 of the hover motors for FW flight instead? Less weight and same propeller efficiency…
Just set q_tailsit_motmx to 3 (or 12) to disable one pair of motors in FW flight.
So the Caipirinha Quad tailsitter in RF8/SITL needs very different yaw parameters than your real model. I tried your values in SITL and I get severe oscillations regardless of the physics settings for prop wash factor and back torque factor…
I wonder why they are so different?
I tried shutting down two motors and just using the remaining two when I was flying on the KK2 boards. but the aircraft didn’t handle well as the motors where not center line thrust. I think one of the things that happens is the one wing is blown and generates disproportional lift etc.
T
Me too. ![]()
I’m also surprised about the weak action of the RCOU to the motors or elevons at this hard Yaw.
Here the Log: https://drive.google.com/open?id=1tgxS4V0A815JJdWmq3DY6OzFYU1pGEf5
or the Params: https://drive.google.com/open?id=1HBF3vdiLC0xXTEOCHJgTXAL1XEek8FMc
May be in the air, when all axes are free, it behaves different to the Rack.
Next tests: Q_A_RAT_YAW_P from 2.2 to 2.4 and Q_A_ACCCEL_YMAX from 27 000 to 45 000
Should I test Q_TAILSIT_INPUT = 2 in the Rack too, it is fixed vertically and can’t pitch?
Could you do a test with
Q_A_ACCEL_Y_MAX 100000.000000
and
Q_A_RAT_YAW_D 0.010000
Q_A_RAT_YAW_FF 0.200000
Q_A_RAT_YAW_FLTD 10.000000
Q_A_RAT_YAW_FLTE 0.000000
Q_A_RAT_YAW_FLTT 0.000000
Q_A_RAT_YAW_I 0.500000
Q_A_RAT_YAW_IMAX 4.000000
Q_A_RAT_YAW_P 0.500000
Those are the values I had for SITL
Your low value for Q_A_ACCEL_Y_MAX may have been the problem.
Do you have RealFlight 8 or 9?
I’ve constructed a model similar to yours in RF8 for simulation of a new quadX frame type with a pusher motor.
Amazing! Yes I have RealFlight 8, but I have never uploaded models to it. I would need a little coaching, and I can research others who have uploaded. I will get on it later this evening once the kids are in bed.
Thanks Mark
Tim
@Tim.Talon This link describes how to install the beta RF8 which supports “flightaxis”.
That is what ArduPilot uses for simulation using the Realflight physics engine:
https://ardupilot.org/dev/docs/sitl-with-realflight.html
The RealFlight model with added pusher motor and normal rudder (although neither the pusher motor nor rudder are visible in the graphics) is here, along with the parameters:
The branch with tailsitter support for the boost (pusher) motor is:
Let me know if you want a binary for your Pixhawk4.
Hi Mark,
I made a Rack Test with your Params. The reaction on the Yaw command is good, but not the stability a the Endposition. Similar like the drunken Pilot of my first tests.
Here the Log: https://drive.google.com/open?id=1UH0uG93kefdsP0ABgzCIAlmM1S_lV99Y
And the Params: https://drive.google.com/open?id=1vxy_xliTGxk-bSAlioqG6sBmDbVDPLtm
The Params of Roll and Pitch are set to Zero. This Axis are fix and with the correct params it produces hard shaking which disturbe the Yaw Test.
The same test configuration as with my params in post 515.