This is what transitions look like for the BiWing in SITL:
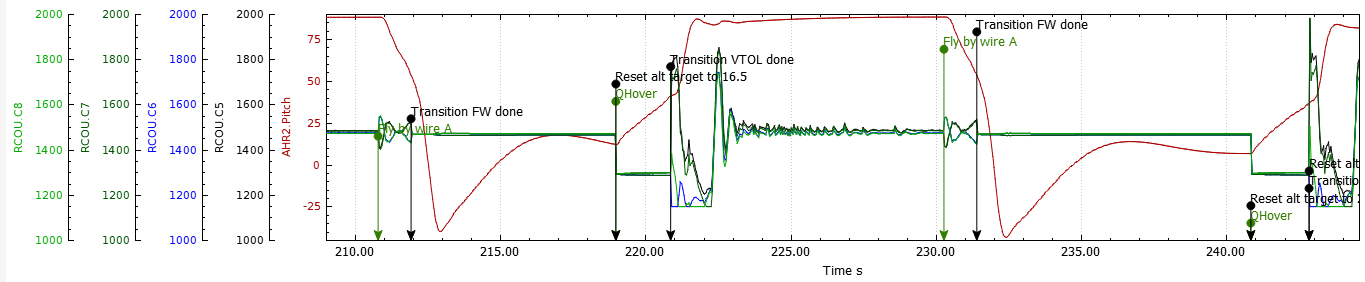
All 4 motors are enabled in FW modes, and the throttle is set to hover thrust during transition from FW to VTOL mode. The transitions are “done” when the nose has pitched down (up) by Q_TAILSIT_ANGLE from vertical (horizontal). Q_TAILSIT_ANGLE is 35 degrees for this log, so “FW done” occurs at roughly +55 degrees and “VTOL done” occurs at about +35 degrees.
The timeout for transition to FW is TRANSITION_MS (2000 here) and the timeout for transition to VTOL is hardwired at 2000 msec.