One thing I want to point out about using a logical switch for arming: If the RC failsafe is caused by the radio powering down (RC Battery, etc), when the radio powers up again the logical switch will be 0 and will send a disarm command to the drone. Not a reason to not use this method, but just be aware of it. For critical configurations I use stick arming, with a motor stop switch, or on copter I’ve started to use the arm/emergency stop configuration.
I’m curious @Yuri_Rage why you decided to use the logical switches rather than just normal stick arming that’s already in Ardupilot?
Apologies if I was unclear - I don’t actually use the logical switch for arming. I use stick arming, but the logical switch follows the gesture and switches Ch5 (which is unassigned in the autopilot) such that ExpressLRS sees the flags set by it. Is that a little clearer?
I do sometimes monitor Ch5’s logical switch output in my LED scripts and either change the lighting effect or print a GCS message when it switches state. If I use the e-stop feature, it ends up on Ch5, and I forego the logical switch complexity.
Further discussion on arming philosophy should probably go in another topic - I’ve taken enough space here with the tangent
I also use an arm switch in conjunction with the throttle, but as you say if the radio powers down/up the channels will be in their default (disarmed) state.
My theory is: if something strange happens to the radio, leave it OFF and let the aircraft do what it should, RTL. Once the aircraft is landed, mess around with the radio all you like.
I also have a “throttle cut” switch set up like a lot of the old Plane transmitters had, so if there is something odd going on we can just hit that switch and the copter goes into RC failsafe - also RTL.
The old throttle cut switch seemed like a good idea to run with even on the new transmitters, since you can leave it in CUT and the radio or the copter wont ever do anything, by accident or otherwise.
Your throttle cut switch would also work nicely on Ch5 in an ELRS config (though I understand it’s possible to have it just override TX throttle and not be assigned an output at all). It’s a technique I hadn’t thought about but is the most logical take I think I’ve heard yet.
Just old ideas. Use the right combination of components. Nobody had 7" props in stock?
If you want to try for another crash reset the Initial Tune Parameters for 8" props and set these parameters:
ATC_RAT_PIT_D,0.002 (and same for Roll)
ATC_RAT_PIT_I,0.08 (and same for Roll)
ATC_RAT_PIT_P,0.08 (and same for Roll)
PSC_ACCZ_I,0.2
PSC_ACCZ_P,0.1
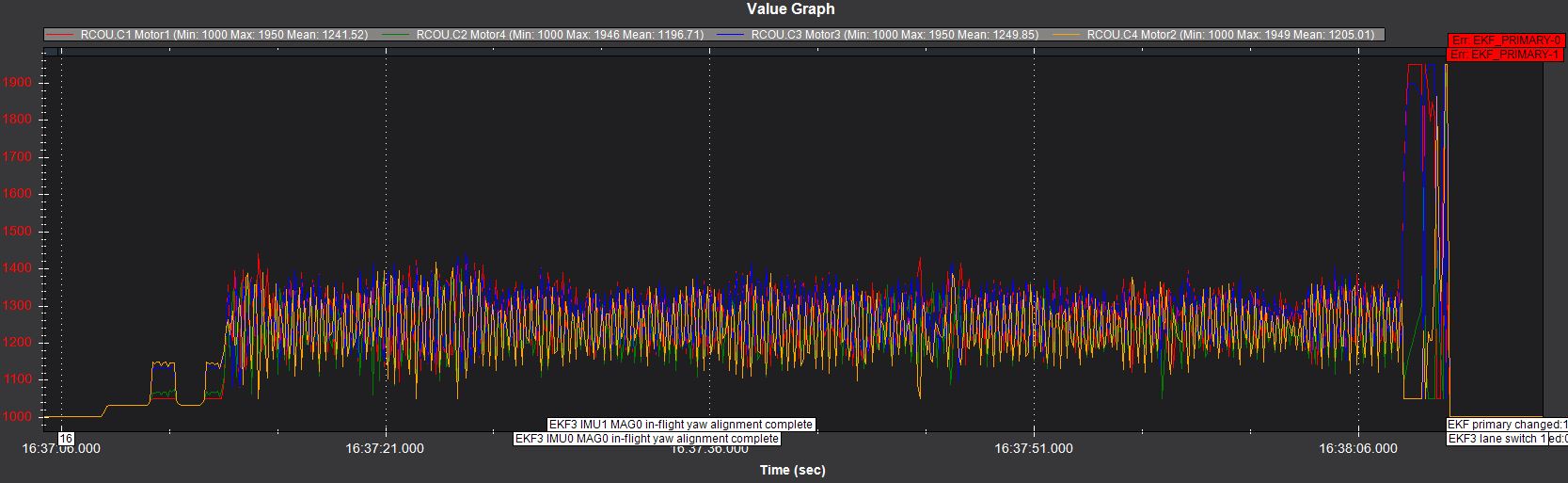
So you know what to look for in the log here are the motor outputs oscillating and then 2 lose thrust and crashola.
I do hear you Dave, but the thing flew for almost 8 minutes, w/10", with the last set of parms you folks gave me.
I had the 8" ones around, and figured 8 is better than ten. I will order some 7" though.
That last two seconds you show there is dramatic!
Any guess on where is that failure coming from? The ESCs overloading?
In my little mind the stupid thing should stay in the air longer with smaller props.