input_tc tends to limit how quickly you get to your maximum angular rate rather than the maximum angular rate. By that I mean input_tc is intended to limit angular acceleration. So if it is really slow then it can dominate and limit the maximum rate but it isn’t normally dominant.
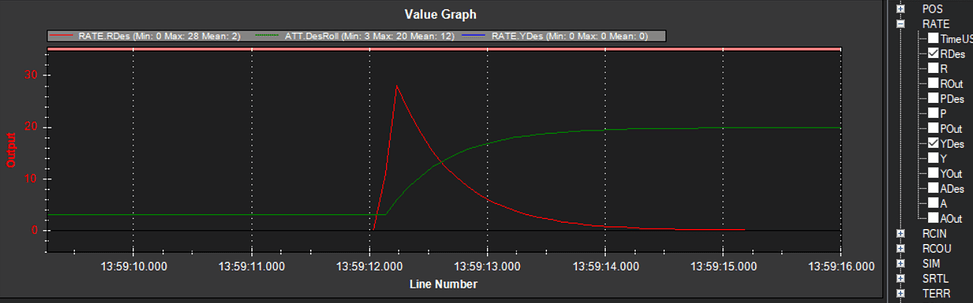
Without any angular accel limits, the square root control algorithm is a first order response in angle. The plot below shows the desired output from the square root controller. The attitude is shown to have a first order response shaping.
It shapes how quickly the aircraft achieves the requested angle which for the position controller is the horizontal acceleration. The jerk used in the position controller shapes how quickly the acceleration is achieved. I think you even have cosine shaping on the onset for the jerk. I don’t see how this is different.
I guess I was just looking for a calculation or rule of thumb to determine when the position controller is asking more than what the attitude controller can give in terms of rate at which horizontal acceleration can be achieved (i.e. how quickly you can roll into a turn). Maybe this is not a factor until some large value of ATC_INPUT_TC is achieved but I think it is useful to know since this will limit the position controller when rolling into a turn.
On a similar note, I had played with this new cornering accel and it does help; but to keep speed up in turns for cases where the waypoints are closer together like in a mapping survey, the jerk needed to be increased so that the time to roll into and out of the turn was decreased. This made the pitch response very sensitive. It might be worth investigating an additional cornering jerk parameter (I know, I know… Like we need one more parameter). Just like the cornering accel, this allows the user to adjust the cornering a little more.
Hello
After changing the version of MatekF405-STD to V4.4.X, it no longer recognizes the barometer. The barometer of this FC is like DPS310.
The parameters are set as follows.
BARO_PROBE_EXT=64
BARO_EXT_BUS=0
It was normal until V4.3.8.
soramon
The real problem with this is it would require big changes to the S-Curve generation. That isn’t going to be practical for quiet a while.