Not the maximum, set it to something meanigfull, like 8 meters (800 cm)
I have set it to 1000, that is the maximum (unless you can go over the maximum??). This make no difference in cornering, though you would think it should. Whatever you set it to the drone still goes all the way to the waypoint, pretty much stops then turns.
The only way to get it to corner sooner is to increase the WPNAV_ACCEL_C which then makes the drone go way too fast through the corner, making for bad survey data.
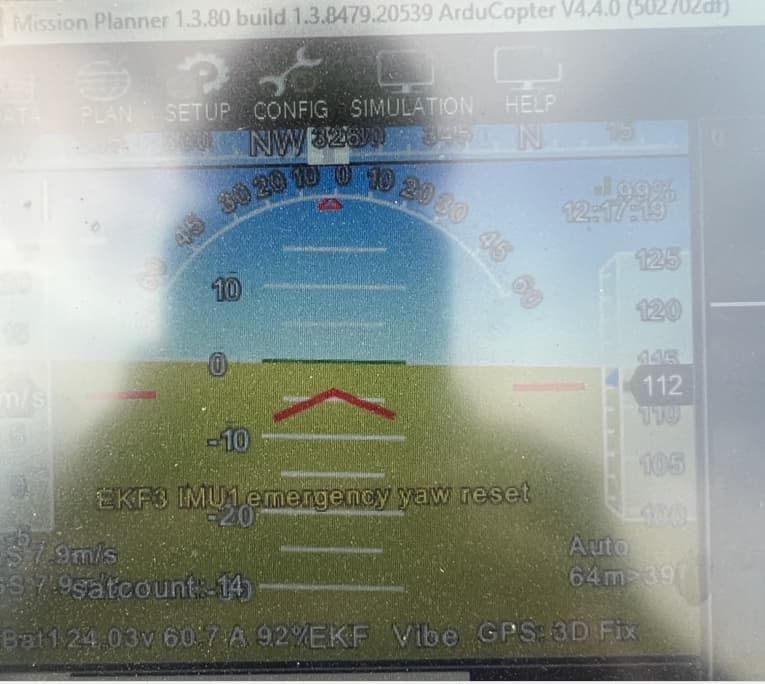
So after updating to 4.4.0 we now get this message at the beginning of the flight.
It happens once, the drone quickly yaws then continues on it’s way without issue.
I am guessing this is replacing the old message that warned something like “ground anomaly yaw re-aligned”
My question is… “Is this cause for concern or typical”
If it’s typical why are we calling it “Emergency” it does not give confidence in the pilot to read this when it’s not an “Emergency”
Same goes for “Bad battery” this makes no sense to me… the battery is fine its just running low. It should say “Low battery”
Hi @steve,
The “Emergency yaw reset” is cause for concern because, assuming the compass is being used for heading, it is significantly inaccurate and the EKF is having to step in and stop using the compass and instead use an internal estimate based off the GPS and IMU movements.
As we say, it’s all guesswork without a log but in any case, the most likely reason for an incorrect compass heading is interference from metal in the frame or (less likely) a bad compass calibration… or a compass calibration done before additional metal bits were added to the frame (e.g. batteries, cameras, RC equipment)
1 Like
Thanks for the response as always it’s appreciated
The frame is the same as all the others, no metal present, compass calibration done with payloads and all equipment powered up, nothing added.
I can try to get a log but it will only be a telem log available.
Thanks
1 Like
That will be of little value.
1 Like
I have a new problem, with 4.4.0 we now have "PreArm: heater temp low (38.3<40)
It is taking 5-20 minutes to get past this.
These drones flew all last year in -30 temps without this check no issues.
So what are my options here?
- Can I reduce the min temp to 37 or 38? via BRD_HEAT_TARG
- Can I disable the temp check
Again hundreds of flights last year, no issues on FW that did not have this check in place.
Thanks all.
Hi @steve,
As mentioned in another thread it should be possible to relax the check (or disable it perhaps) by setting BRD_HEAT_LOWMGN.
Thanks for the response… I don’t recall posting this anywhere else I do try not to cross post.
However I see that this BRD_HEAT_LOWMGN is in Celsius with a range of 0-20,
The dialogue message is saying PreArm: heater temp low (38.3<40) I have to assume this is Deg F
Existing value of PreArm: heater temp low (38.3<40) is set to 5 Deg C (41 deg F)
I will try setting it to 2 which will equal about 36 Deg F
1 Like
All are celcius. The parameter limits are wrong and can be ignored
Well then that makes no sense then.
Default is set to 5 deg C and the message says it’s at 38 deg C ?
If so then why is it not arming?
The target is 45. 45-5 is greater than 38.
Ah I see the parameters list description threw me… I would recommend using more plain language here.
" is lower than this margin below "
How about just saying the AP will subtract this number from the target number.
Anyway thanks! I would never had figured that out. I will set it to 10
1 Like
@steve I was following your posts about curves with stops. The same happens here, but ultil the 4.3.6 I had perfect curves. I made all the changes like: Radius, changing all WP_ACCELL…XXX… and the same result, or little best then last flights. Did you make progress on this?


Nope no progress. The drone does not fly with nice curves.
The only way to get somewhat of a curve is to crank up WPNAV_ACCEL_C
The problem with that is that it goes way too fast through the corners and the photos are blurry
So now I am stuck with it stopping and turning. It’s not only inefficient it’s not smooth like before (it’s jerky etc) which can effect GPS PPK data
It’s a complete different behavior.
I am stuck with it even if they fix it in a future release I won’t upgrade. Every time I upgrade I have to find all the little things that changed and then I get calls from the field etc so I will live with it until I can’t anymore ![]()
Ardupilot is awesome but sometimes it’s better the devil you know and thus I do not change firmware if I can help it.
1 Like
@rmackay9 can this issue be somehow prioritized. I do not like regressions, and I do not like having people using old FW because of regressions ![]()
@peterbarker this is one of the things that the testsuite should have caught.
Hi @vinnyferrari,
Thanks for the report. Could you provide logs for the two flights?
I suspect the issue is a tuning issue because surely this would have turned up in beta testing. The only change that I’m aware of was the addition of the WPNAV_ACCEL_C parameter so this is one parameter at least that we should check.
Thanks for the ping.
1 Like
@steve, @vinnyferrari, @amilcarlucas,
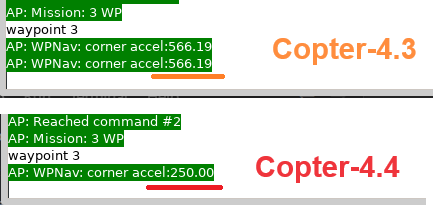
I’ve done some comparisons between 4.3.8 and 4.4.3-beta1 and the only code change that I see if the addition of the WPNAV_ACCEL_C parameter (AC_WNAV library 4.3 vs 4.4). This change does affect cornering slightly because the default cornering acceleration used changes from 566.19 (in 4.3) to 250 (in 4.4).
In my tests, setting WPNAV_ACCEL_C to 566.19 resulted in the same cornering path as 4.3 produced. Below are screen shots of a 90deg corner in the three different setups. So 4.3 default, 4.4 default and then finally 4.4 with WPNAV_ACCEL_C = 566.19 to get the same path as 4.3.



Here’s the mission I used
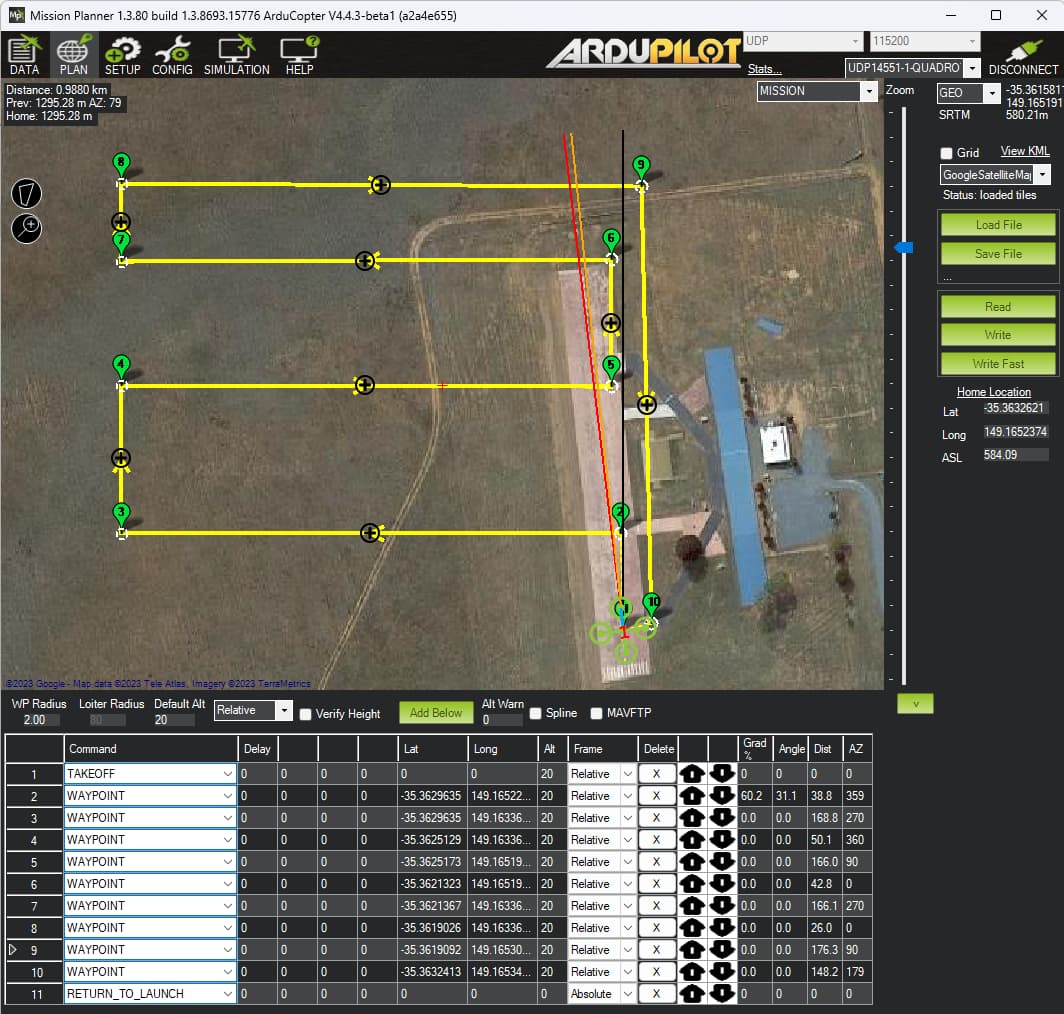
So at the moment I don’t see the issue, just a slight change in the default cornering acceleration. If there’s log file or parameter file I could look at that might help, sorry if this has been posted already and I missed it.
FYI @Leonardthall
1 Like
Hi, thanks for quick reply and help us in a lot of questions!
Logs here:
Link
i will made more tests using WPNAV_ACCEL_C and making a fresh instalation and parameters of 4.4.2
1 Like
Thanks for looking into it. Yes I can get the same cornering by increasing WPNAV_ACCEL_C (I did mention this above ![]() ) But the drone goes waaaay too fast through the corners to do this.
) But the drone goes waaaay too fast through the corners to do this.
My normal flight speed is 9 m/s and the drone banks hard and fast at even 400 I would not try 566
I have WPNAV_ACCEL_C set to 200 in order to slow down the drone for slower cornering.
Perhaps there is some other parameter that is new which depicts the cornering speed? If we could slow that down then we can increase WPNAV_ACCEL_C again.